Download
1 / 1
10 likes | 125 Views
Attitude determination for limb-scanning satellites: The "KNEE" at 305 nm. Christopher E. Sioris 1 , Christian von Savigny 1 , Richard L. Gattinger 2 , Jack C. McConnell 1 , Ian C. McDade 1 , Erik Griffioen 1 , Edward J. Llewellyn 2 , and the Odin team 3.

E N D
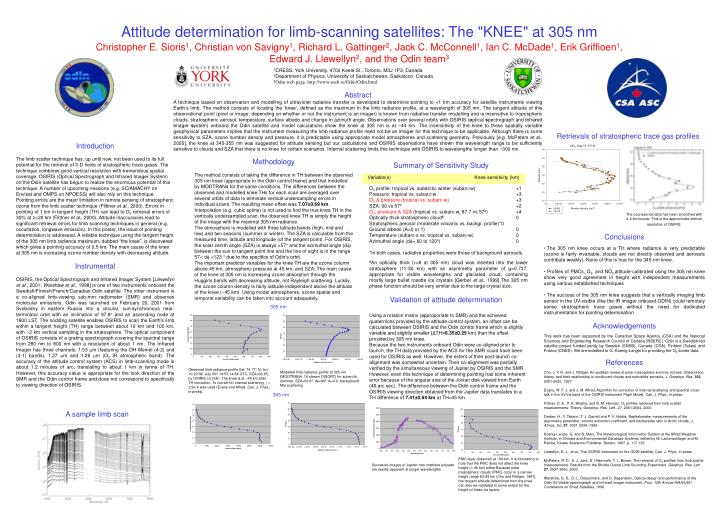
Attitude determination for limb-scanning satellites: The "KNEE" at 305 nm Christopher E. Sioris1, Christian von Savigny1, Richard L. Gattinger2, Jack C. McConnell1, Ian C. McDade1, Erik Griffioen1, Edward J. Llewellyn2, and the Odin team3 1CRESS, York University, 4700 Keele St., Toronto, M3J 1P3, Canada 2Department of Physics, University of Saskatchewan, Saskatoon, Canada 3Odin web page, http://www.snsb.se/Odin/Odin.html Abstract A technique based on observation and modelling of ultraviolet radiative transfer is developed to determine pointing to <1 km accuracy for satellite instruments viewing Earth’s limb. The method consists of locating the ‘knee’, defined as the maximum in the limb radiance profile, at a wavelength of 305 nm. The tangent altitude of this observational point (pixel or image, depending on whether or not the instrument is an imager) is known from radiative transfer modelling and is insensitive to tropospheric clouds, stratospheric aerosol, temperature, surface albedo and change in azimuth angle. Observations over several orbits with OSIRIS (optical spectrograph and infrared imager system) onboard the Odin satellite and model calculations show the knee at 305 nm is at ~44 km. The insensitivity of the knee to these spatially variable geophysical parameters implies that the instrument measuring the limb radiance profile need not be an imager for this technique to be applicable. Although there is some sensitivity to SZA, ozone number density and pressure, it is predictable using appropriate model atmospheres and scattering geometry. Previously [e.g. McPeters et al., 2000], the knee at 345-355 nm was suggested for attitude sensing but our calculations and OSIRIS observations have shown this wavelength range to be sufficiently sensitive to clouds and SZA that there is no knee for certain scenarios. Internal scattering limits this technique with OSIRIS to wavelengths longer than ~300 nm. Retrievals of stratospheric trace gas profiles Introduction The limb scatter technique has, up until now, not been used to its full potential for the retrieval of 3-D fields of stratospheric trace gases. The technique combines good vertical resolution with tremendous spatial coverage. OSIRIS (Optical Spectrograph and Infrared Imager System) on the Odin satellite has begun to realize the enormous potential of this technique. A number of upcoming missions (e.g. SCIAMACHY on Envisat and OMPS on NPOESS) will also rely on this technique. Pointing errors are the major limitation in remote sensing of stratospheric ozone from the limb scatter technique (Flittner et al., 2000). Errors in pointing of 1 km in tangent height (TH) can lead to O3 retrieval errors of 30% at z=20 km (Flittner et al., 2000). Altitude inaccuracies lead to significant retrieval errors for limb scanning techniques in general (e.g. occultation, longwave emission). In this poster, the issue of pointing determination is addressed. A reliable technique using the tangent height of the 305 nm limb radiance maximum, dubbed “the knee”, is discovered which gives a pointing accuracy of 0.5 km. The main cause of the knee at 305 nm is increasing ozone number density with decreasing altitude. Instrumental OSIRIS, the Optical Spectrograph and Infrared Imager System [Llewellyn et al., 2001; Warshaw et al., 1998] is one of two instruments onboard the Swedish/Finnish/French/Canadian Odin satellite. The other instrument is a co-aligned limb-viewing sub-mm radiometer (SMR) and observes molecular emissions. Odin was launched on February 20, 2001 from Svobodny in eastern Russia into a circular, sun-synchronous near-terminator orbit with an inclination of 97.8° and an ascending node at 1800 LST. The nodding satellite enables OSIRIS to scan the Earth's limb within a tangent height (TH) range between about 10 km and 100 km, with ~2 km vertical sampling in the stratosphere. The optical component of OSIRIS consists of a grating spectrograph covering the spectral range from 280 nm to 800 nm with a resolution of about 1 nm. The Infrared Imager has three channels: 1.53 m (featuring the OH Meinel (4-2) and (3-1) bands), 1.27 m and 1.26 m (O2 IR atmospheric band). The accuracy of the attitude control system (ACS) in limb-scanning mode is about 1.2 minutes of arc, translating to about 1 km in terms of TH.However, this accuracy value is appropriate for the look direction of the SMR and the Odin control frame and does not correspond to specifically to viewing direction of OSIRIS. Methodology The method consists of taking the difference in TH between the observed 305 nm knee (appropriate to the Odin control frame) and that modelled by MODTRAN4 for the same conditions. The differences between the observed and modelled knee THs for each scan are averaged over several orbits of data to eliminate vertical undersampling errors in individual scans. The resulting mean offset was 7.07±0.69 km. Interpolation (e.g. cubic spline) is not used to find the true knee TH in the vertically undersampled scan, the observed knee TH is simply the height of the image with the maximal 305 nm radiance. The atmosphere is modelled with three latitude bands (high, mid and low) and two seasons (summer or winter). The SZA is calculable from the measured time, latitude and longitude (of the tangent point). For OSIRIS, the solar zenith angle (SZA) is always >57° and the azimuthal angle (d) between the sun to tangent point line and the line of sight is in the range 57< d <123 ° due to the specifics of Odin’s orbit. The important predictor variables for the knee TH are the ozone column above 45 km, atmospheric pressure at 45 km, and SZA. The main cause of the knee at 305 nm is increasing ozone absorption through the Huggins bands with decreasing altitude, not Rayleigh scattering. Luckily, the ozone column density is fairly latitude-independent above the altitude of the knee (~45 km). Using model atmospheres, ozone spatial and temporal variability can be taken into account adequately. Summary of Sensitivity Study Variable(s) Knee sensitivity (km) O3 profile: tropical vs. subarctic winter (subarc-w) +1 Pressure: tropical vs. subarc-w +3 O3 & pressure (tropical vs. subarc-w) +3 SZA: 90 vs 57º +2 O3, pressure & SZA (tropical vs. subarc-w, 87.7 vs 57º) +4 Optically thick stratospheric cloud# 0 Stratospheric aerosol (moderate volcanic vs. backgr. profile)* 0 Ground albedo (A=0 or 1) 0 Temperature (subarc-s vs. tropical vs. subarc-w) 0 Azimuthal angle (d= 60 to 120º) 0 *In both cases, radiative properties were those of background aerosols. #An optically thick (=8 at 305 nm) cloud was inserted into the lower stratosphere (11-30 km) with an asymmetry parameter of g=0.737, appropriate for visible wavelengths and glaciated cloud, containing mostly large bullet rosette ice crystals [Gerber et al., 1999].The 305 nm phase function should be very similar due to the large crystal size. The ozonesonde data has been smoothed with a 2-km boxcar. This is the approximate vertical resolution of OSIRIS. • Conclusions • The 305 nm knee occurs at a TH where radiance is very predictable (ozone is fairly invariable, clouds are not directly observed and aerosols contribute weakly). None of this is true for the 345 nm knee. • Profiles of PMCs, O3, and NO2 altitude-calibrated using the 305 nm knee show very good agreement in height with independent measurements using various established techniques • The success of the 305 nm knee suggests that a vertically imaging limb sensor in the UV-visible (like the IR imager onboard ODIN) could remotely sense stratospheric trace gases without the need for dedicated instrumentation for pointing determination • Acknowledgements • This work has been supported by the Canadian Space Agency (CSA) and the National Sciences and Engineering Research Council of Canada (NSERC). Odin is a Swedish-led satellite project funded jointly by Sweden (SNSB), Canada (CSA), Finland (Tekes) and France (CNES). We are indebted to G. Koenig-Langlo for providing the O3 sonde data. • References • Cho, J. Y. N. and J. Röttger, An updated review of polar mesosphere summer echoes: Observation, theory, and their relationship to noctilucent clouds and subvisible aerosols, J. Geophys. Res.102, 2001-2020, 1997. • Evans, W. F. J. and J. M. Alfred, Algorithm for correction of internal scattering and spectral cross-talk in the UV/vis band of the OSIRIS Instrument Flight Model, Can. J. Phys., in press. • Flittner, D. E., P. K. Bhartia, and B. M. Herman, O3 profiles retrieved from limb scatter measurements: Theory, Geophys. Res. Lett., 27, 2061-2064, 2000. • Gerber, H., Y. Takano, T. J. Garrett and P. V. Hobbs, Nephelometer measurements of the asymmetry parameter, volume extinction coefficient, and backscatter ratio in Arctic clouds, J. Atmos. Sci. 57, 3021-3034, 1999. • Koenig-Langlo, G. and B. Marx, The Meteorological Information System at the Alfred Wegener Institute, in Climate and Environmental Database Systems, edited by M. Lautenschlager and M. Reinke, Kluwer Academic Publisher, Boston, 1997, p. 117-125. • Llewellyn, E. J., et al., The OSIRIS instrument on the ODIN satellite, Can. J. Phys., in press. • McPeters, R. D., S. J. Janz, E. Hilsenrath, T. L. Brown, The retrieval of O3 profiles from limb scatter measurements: Results from the Shuttle Ozone Limb Sounding Experiment, Geophys. Res. Lett.27, 2597-2600, 2000. • Warshaw, G. D., D.-L. Desaulniers, and D. Degenstein, Optical design and performance of the Odin UV/visible spectrograph and infrared imager instrument, Proc. 10th Annual AIAA/USU Conference on Small Satellites, 1996. Validation of attitude determination 305 nm Using a rotation matrix (approporiate to SMR) and the achieved quaternions provided by the attitude control system, an offset can be calculated between OSIRIS and the Odin control frame which is slightly variable and slightly smaller (ΔTH=6.35±0.25 km) than the offset provided by 305 nm knee. Because the two instruments onboard Odin were co-aligned prior to launch, the TH data provided by the ACS for the SMR could have been used for OSIRIS as well. However, the extent of their post-launch co-alignment was somewhat uncertain. Their co-alignment was partially verified by the simultaneous viewing of Jupiter by OSIRIS and the SMR. However, even this technique of determining pointing has some inherent error because of the angular size of the Jovian disk viewed from Earth (46 arc sec). The difference between the Odin control frame and the OSIRIS viewing direction obtained from the Jupiter data translates to a TH difference of 7.41±0.64 km at TH=45 km. Observed limb radiance profile (lat: 74-77 N, lon: 10-20W, July 30th 14:53-14:54 UTC, SZA=63.8º) by OSIRIS on Odin. The knee is at ~45 km after TH correction. To correct for internal scattering, = 2.5e-6 was used (Evans and Alfred, Can. J. Phys., in press). Modelled limb radiance profile at 305 nm (MODTRAN4, 16 stream DISORT) for subarctic summer, SZA=63.8º, d=90º, A=0.2, background Mie scattering 345 nm A sample limb scan PMC layer observed at ~84 km. It is interesting to note that the PMC does not affect the knee height (= 45 km) either.Because polar mesospheric clouds (PMC) occur in a narrow height range 82-84 km (Cho and Röttger, 1997), the tangent altitude determined from the knee can also be validated to some extent by the height of these ice layers. Succesive images of Jupiter: two methane polyads are readily apparent at longer wavelengths.