Download
1 / 2
30 likes | 244 Views
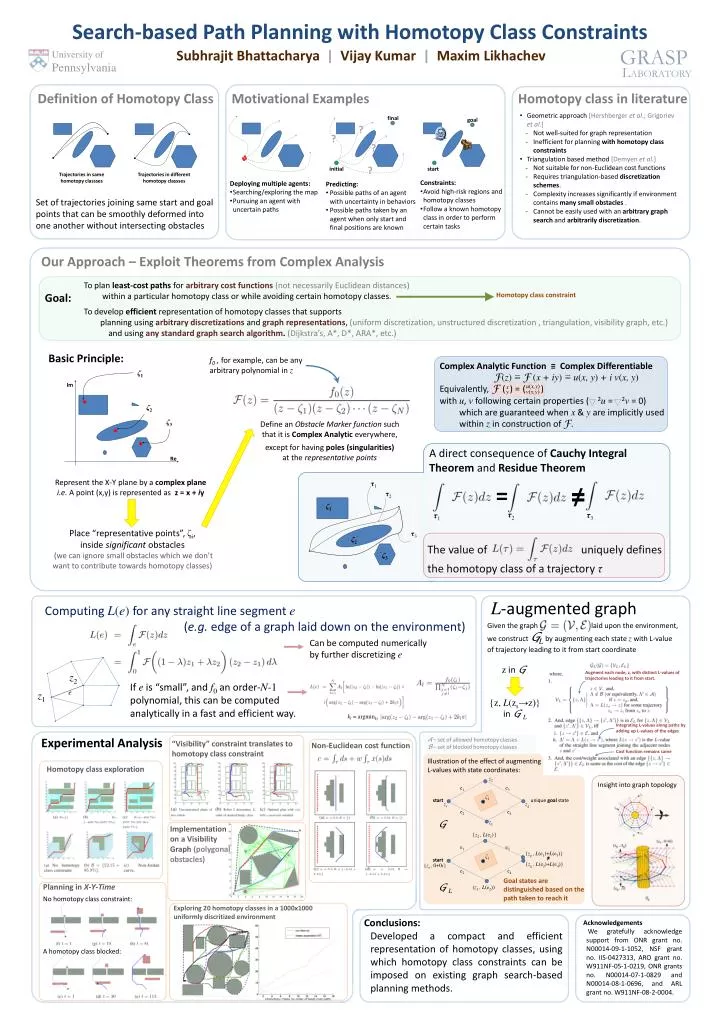
Search-based Path Planning with Homotopy Class Constraints. University of Pennsylvania. GRASP. Subhrajit Bhattacharya | Vijay Kumar | Maxim Likhachev. L ABORATORY. Complex Analytic Function ≡ Complex Differentiable

E N D
Search-based Path Planning with Homotopy Class Constraints University ofPennsylvania GRASP Subhrajit Bhattacharya | Vijay Kumar | Maxim Likhachev LABORATORY Complex Analytic Function ≡ Complex Differentiable F(z) ≡ F (x + iy) ≡ u(x, y) + i v(x, y) Equivalently,F ( ) = ( ) with u, v following certain properties ( 2u = 2v = 0) which are guaranteed when x & y are implicitly used within z in construction of F. u(x,y) Definition of Homotopy Class Motivational Examples Homotopy class in literature x v(x,y) y • Geometric approach [Hershberger et al.; Grigorievet al.] • Not well-suited for graph representation • Inefficient for planning with homotopy class constraints • Triangulation based method [Demyenet al.] • Not suitable for non-Euclidean cost functions • Requires triangulation-baseddiscretization schemes. • Complexity increases significantly if environment contains many small obstacles . • Cannot be easily used with an arbitrary graph search and arbitrarily discretization. final goal ? ? τ2 τ1 τ3 z2 ? z1 ? initial start Trajectories in same homotopy classses Trajectories in different homotopy classses • Constraints: • Avoid high-risk regions and homotopy classes • Follow a known homotopy class in order to perform certain tasks • Deploying multiple agents: • Searching/exploring the map • Pursuing an agent with uncertain paths • Predicting: • Possible paths of an agent with uncertainty in behaviors • Possible paths taken by an agent when only start and final positions are known Set of trajectories joining same start and goal points that can be smoothly deformed into one another without intersecting obstacles Our Approach – Exploit Theorems from Complex Analysis To plan least-cost paths for arbitrary cost functions (not necessarily Euclidean distances) within a particular homotopy class or while avoiding certain homotopy classes. To develop efficient representationof homotopy classes that supports planning using arbitrary discretizationsand graph representations, (uniform discretization, unstructured discretization , triangulation, visibility graph, etc.) and using any standard graph search algorithm.(Dijkstra’s, A*, D*, ARA*, etc.) Homotopy class constraint Goal: Basic Principle: f0 , for example, can be anyarbitrary polynomial in z ζ1 Im ζ2 ζ3 Define an Obstacle Marker function suchthat it is Complex Analytic everywhere, except for having poles (singularities)at the representative points A direct consequence of Cauchy Integral Theorem and Residue Theorem Re Represent the X-Y plane by a complex plane i.e. A point (x,y) is represented as z = x + iy τ1 = ≠ τ2 ζ1 The value of uniquely definesthe homotopy class of a trajectory τ Place “representative points”, ζi,inside significant obstacles (we can ignore small obstacles which we don’t want to contribute towards homotopy classes) τ3 ζ2 ζ3 L-augmented graph Computing L(e) for any straight line segment e (e.g. edge of a graph laid down on the environment) Given the graph laid upon the environment,we construct GL by augmenting each state z with L-value of trajectory leading to it from start coordinate Can be computed numerically by further discretizing e z in G Augment each node, z, with distinct L-values of trajectories leading to it from start. If e is “small”, and f0 an order-N-1 polynomial, this can be computedanalytically in a fast and efficient way. e {z, L(zs→z)} in G L kl = argminkl Integrating L-values along paths by adding up L-values of the edges Experimental Analysis A – set of allowed homotopy classes B – set of blocked homotopy classes “Visibility” constraint translates tohomotopy class constraint Non-Euclidean cost function Cost function remains same Illustration of the effect of augmenting L-values with state coordinates: Homotopy class exploration z2 Insight into graph topology e1 e3 ζ1 start unique goal state zs zg e2 e4 G z1 Implementation on a Visibility Graph (polygonal obstacles) {z2, L(e1)} e1 e3 {zg , L(e1)+L(e3)} ζ1 ≠ start {zg , L(e2)+L(e4)} {zs , 0+0i} e2 e4 Goal states are distinguished based on the path taken to reach it Planning in X-Y-Time G L (z1, L(e2)) No homotopy class constraint: Exploring 20 homotopy classes in a 1000x1000 uniformly discritized environment Conclusions: Developed a compact and efficient representation of homotopy classes, usingwhich homotopy class constraints can beimposed on existing graph search-based planning methods. Acknowledgements We gratefully acknowledge support from ONR grant no. N00014-09-1-1052, NSF grant no. IIS-0427313, ARO grant no. W911NF-05-1-0219, ONR grants no. N00014-07-1-0829 and N00014-08-1-0696, and ARL grant no. W911NF-08-2-0004. A homotopy class blocked:
Addendum For the simple cases in 2-dimensions we have not distinguished between homotopy and homology. The distinction however does exist even in 2-d. See our more recent [AURO 2012] paper or [RSS 2011] paper for a comprehensive discussion on the distinction between homotopy and homology, examples illustrating the distinction, and its implications in robot planning problems. [AURO 2012] Subhrajit Bhattacharya, Maxim Likhachev and Vijay Kumar (2012) "Topological Constraints in Search-based Robot Path Planning". Autonomous Robots, 33(3):273-290, October, Springer Netherlands. DOI: 10.1007/s10514-012-9304-1. [RSS 2011] Subhrajit Bhattacharya, Maxim Likhachev and Vijay Kumar (2011) "Identification and Representation of Homotopy Classes of Trajectories for Search-based Path Planning in 3D". [Original title: "Identifying Homotopy Classes of Trajectories for Robot Exploration and Path Planning"]. In Proceedings of Robotics: Science and Systems. 27-30 June.