Download
1 / 30
330 likes | 519 Views
Homogeneous Coordinates and Transformation. (x,y). n. Distance to origin. For any two points on the line:. n line. (projection along n ). Line in R 2. General line equation. Normalize:. Line in R 2. Parametric equation of a line. Corresponding implicit form:. Implicitize:.

E N D
(x,y) n Distance to origin For any two points on the line: n line (projection along n) Line in R2 General line equation Normalize:
Line in R2 Parametric equation of a line Corresponding implicit form: Implicitize:
Affine Transformation Properties: • Collinearity (maps a line to a line) • Preserve ratio of distances (midpoint stays in the middle after transformation)
Translation Scaling Reflection (Q = I–2uuT) Rotation about origin Shear Common 2D Affine Transformations
Homogeneous Coordinate • Motivation: to unify representations of affine map (esp. translation)
Definitions Equivalence relation ~ on the set S = R3 \ {(0,0,0)} Ex: Show that this relation is reflexive, symmetric, and transitive Equivalence classes of the relation ~ Homogeneous coordinates Projective plane P2: the set of all equivalence classes An equivalence class is referred to as a point in the projective plane.
Definitions Points on P2: I. [(u,v,w)] with w 0 Choose a representative (u/w, v/w, 1) 1-1 correspondence with Cartesian plane II. [(u,v,w)] with w = 0 Corresponds to points-at-infinity, each with a specific direction Points on P2: the plane R2 plus all the points at infinity
Points at Infinity (x,y,0) Points at infinity: (x,y,0) Reach the same point (at ), from any starting point
Parallel Lines Intersect at Infinity (-2,1,0)
Visualization • Line model [and spherical model]
Line in Cartesian Space (or any multiple of it) (or any multiple of it)
The line passes through (3,1) and (-4,5) Intersection of Examples (cases in R2)
Two parallel lines Defining a line with a point at infinity
Extend to P3 and R3 Plane in Cartesian Space
q0 p q Line in R3(Plücker Coordinate) Line in parametric form Define Plucker coordinate of the line (q, q0)
Space Transformation • Translation • Scaling • Rotation about coordinate axes • Rotation about arbitrary line • Reflection about arbitrary plane (Q=I–2uuT)
Transformed Equations If transformation T is applied to geometry (line/plane), what’s the transformed equation? • Apply T to homogenous line/plane equation?! NOT !! Answers: • See handout p.3 (convert to parametric form; transform the points; then to implicit equation) • More detailed version: see “homogeneous-transformation.ppt” from R. Paul (next page) • Also related to the normal matrix in OpenGL.
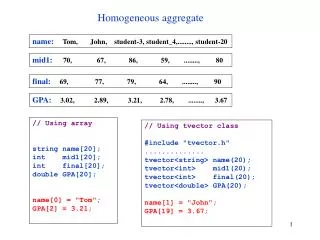
Summary Point u on a plane: After transformation H Point u becomes v = Hu Plane P’ becomes PH-1 Reason: Note if P is written as a column vector, the formula becomes P’ = H-TP
Transformed Quadrics Point u on a quadric: After transformation H Point u becomes v = Hu Quadric Q becomes H-TQH-1 Reason:
v = Hu Transformation
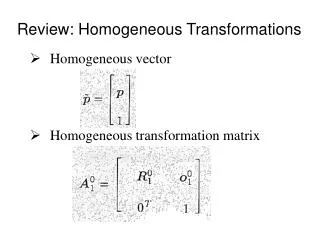
Point Homogenenous coordinate p = [x y z 1] M: affine transform (translate, rotate, scaling, reflect, …) p’= M p Vector Homogeneous coordinate v = [x y z 0] Affine transform (applicable when M is invertible (not full rank; projection to 2D is not) v’= (M-1)T v Vectors and Points are Different! glNormal glVertex (ref)
The w (homogeneous coord) of vectors are 0; hence, the translation part (31 vector) plays no role For rotation, M-1=MT, hence (MT)T = M: rotate the vector as before For scaling: On (M-1)T
Hence This is known as the normal matrix (ref)