Download
1 / 14
230 likes | 822 Views
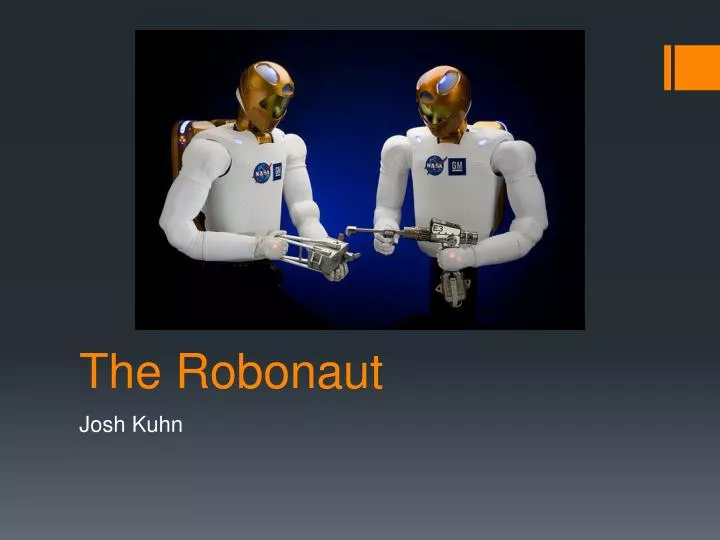
The Robonaut. Josh Kuhn. What is Robonaut?. A dexterous, humanoid robot Developed at NASA’s Johnson Space Center (JSC) with support from GM Designed to work side-by-side with humans 4 current Robonauts. Equipment- Robotnaut 2 Specs. Weight:150 kg 350+ sensors

E N D
The Robonaut Josh Kuhn
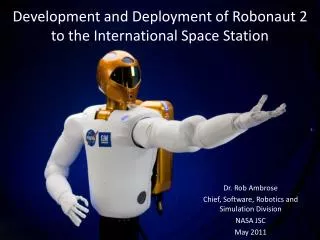
What is Robonaut? • A dexterous, humanoid robot • Developed at NASA’s Johnson Space Center (JSC) with support from GM • Designed to work side-by-side with humans • 4 current Robonauts
Equipment-Robotnaut 2 Specs • Weight:150 kg • 350+ sensors • 4 cameras (stereo vision) + infrared camera for depth perception • 38 PowerPCprocessors • Height: 1.01 m (waist to head) • Shoulder width: 0.78 m • Modular
Equipment-Robotnaut 2 Specs • Dexterous fingers: grasping force of 2.3 kg • Arm reach of 0.81 m • Arms can hold 20 lbs • Performs autonomous tasks and can be controlled remotely by humans • Made of primarily aluminum and some steel
Dexterity • Can use same tools as astronauts • Series elastic joint technology • Extended finger and thumb travel • Miniaturized 6-axis load cells • Redundant force sensing • Ultra-high speed joint controllers
Application • Interacts and assists astronauts • Performs simple, repetitive, and dangerous tasks
Johnson Space Center • Developed by the Robotic Systems Technology Branch • Other projects: • Space Exploration Vehicle (SEV) • Spider • X1 – Exoskeleton • Centaur 1 & 2
Mobility • Centaur 1 & 2 • Rovers created to carry Robonaut and other payloads • “Space legs” • Segwey • ISS roboticarm • Future lower bodies for Robonautinclude zero-gravity climbing legs for EVAs
Centaur 2 • Centaur 2’s unique characteristics • Force controlled suspension • Thermal/dust isolation • Crab steering • Body articulation • In-hub wheel actuation
Robonaut in Space! • Robonaut 2 launched up to the ISS on February 24th, 2011, fulfilling a 15 year dream to put a humanoid robot into space.
Limitations/Costs • $2.5 million • Limited mobility • Limited weight bearing capacity • Limited autonomous ability
Conclusion • First Humanoid Robot in space • Additional phases for added mobility initiated • Modular parts to be sent to ISS • One of the most dexterous robots of its kind • Can do things humans cannot (range of motion, precision, repeatability)
Works Cited • http://robonaut.jsc.nasa.gov/default.asp#panel-6 • http://traclabs.com/robotics/robot-all-stars/ • http://www.nbcnews.com/id/5798085/ns/technology_and_science-space/t/nasas-robonaut-finally-gets-its-legs/#.UW3HL4Gu8RE • http://www.youtube.com/watch?feature=endscreen&v=rvd7ZM5AvbU&NR=1 • https://www.youtube.com/watch?v=2tnlIGE1PvU