Download
1 / 19
290 likes | 532 Views
Multispectral Camera. Final Project Review Team Parente. Simon Belkin, Audrey Finken , Grant George, & Matthew Walczak. Problem & Solution. Problem - Scientists desire the ability to capture measurements based on reflected energy (radiance)

E N D
Multispectral Camera Final Project Review Team Parente Simon Belkin, Audrey Finken, Grant George, & Matthew Walczak
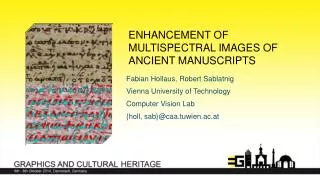
Problem & Solution • Problem - Scientists desire the ability to capture measurements based on reflected energy (radiance) • Common camera technology only captures light in three primary wavelengths: Red, Green, and Blue (RGB) in the visible spectrum • Solution – Multispectral camera captures wavelengths throughout the entire spectrum (including near-infrared/infrared)
Final Design Review Deliverables • Filter wheel turning and stopping at each filter for period of time, capturing image, and rotating to the next filter • Aberration mitigation for all filters • Transmitting captured image data from camera to Raspberry Pi • Identifying geological markers present in rocks and soil
Filter Wheel Mechanics • FDR Solution • Program the filter wheel location in Python • Replace Hall Effect Sensor and add to Python program to identify start location • Accomplished • A program turns the filter wheel. • Hall Effect sensor used to recognizes start point location. • With the start point location the program can turn to specific filter and run through the filters pausing for outside response.
Filter Selection • Selected • 436nm • 670nm • 750nm • 860nm • 990nm • Other • 425nm • 450nm • 510nm
Optical System • Out of focus condition due to the addition of filter wheel required compensation. • 3.75” (95.3mm) of extension tubing. • A +33mm convex relay lens. • Thin lens equation, 1/di = 1/f – 1/do, determines the distance to the object, do, and to the image, di.
Required Focal Length Adjustment • Cameras are calibrated to focus on the visible portion of the light spectrum. As you travel further away from the visible spectrum and into the infrared spectrum, a slight shift in focus is necessary for camera to obtain sharpness of image.
Pi to Camera Interface Problem – Driver Installation • Drivers provided, not officially “supported” • “Fedora 5” build conversion to Raspbian “wheezy” • Attempt to Cross-compile module • Module compiled, but unrecognizable by OS. Cannot start via terminal command • Pi integration determined to be low priority, efforts focused on ensuring quality image capture
Solution – Image Registration Problem - aberration • An optical aberration is a deviation from the optical predictions • Solution- Image registration • Image Registration is the process of estimating an optimal transformation between two images for all filters • Use of checkerboard test in Matlab to calibrate camera
Sift matching points on images • Points from image matching points from two images