Download
1 / 16
160 likes | 386 Views
November 2003 KC-135 SPHERES flight test results. Mark O. Hilstad, Simon Nolet, Dustin Berkovitz, Alvar Saenz-Otero, Dr. Edmund Kong, and Prof. David W. Miller MIT Space Systems Laboratory 2003-11-24. Overview. Attitude control and beacon tracking Tracking of a hand-held beacon by a sphere.

E N D
November 2003 KC-135 SPHERES flight test results Mark O. Hilstad, Simon Nolet, Dustin Berkovitz, Alvar Saenz-Otero, Dr. Edmund Kong, and Prof. David W. Miller MIT Space Systems Laboratory 2003-11-24
Overview • Attitude control and beacon tracking • Tracking of a hand-held beacon by a sphere. • Tracking of a sphere by another sphere. • Simple search pattern • Open-loop three-axis rotation • Coordinated search pattern • Elements of the “lost in space” maneuver • Docking • Initial approach stage only • Identification of inertia and center of mass • Lessons learned A series of four KC-135 flights during the week of 3 Nov 2003 was sponsored by the Jet Propulsion Laboratory’s Terrestrial Planet Finder program. These flights were used to test algorithms designed by several members of the SPHERES team, and by NASA Ames. The results of these tests are presented herein. This presentation references the following video files: • KC135_Nov03_flight2_para23.mpg • KC135_Nov03_flight4_para02.mpg • KC135_Nov03_flight4_para03.mpg • KC135_Nov03_flight4_para10.mpg • KC135_Nov03_flight4_para13.mpg • KC135_Nov03_flight4_para18.mpg • KC135_Nov03_flight4_para19.mpg • KC135_Nov03_flight4_para29.mpg Nov. 2003 KC-135 results
Beacon tracking experiments • Objective • Demonstrate tracking of a beacon and optimal rotation along the shortest path • Validate the 3-D control law by demonstrating off-axis 3-D attitude control • Experiment description • Tracking of a beacon randomly located in the test volume • Tracking of a free floating sphere’s on-board beacon • Two spheres simultaneously tracking each others’ on-board beacons Flight 2, parabola 23 Flight 4, parabola 18 Nov. 2003 KC-135 results
Beacon tracking results • Flight 4, parabola 18 • Pointing error is reduced in each test (q1, q2 and q3 tend toward zero, while q4 tends toward one) • Body rates show angular acceleration and deceleration, as expected Nov. 2003 KC-135 results
Simple search • Initial conditions • A single sphere stationary with respect to the KC frame • Open-loop spin • Try to point the onboard beacon in as many directions as possible • Attempt to map 4 steradians • Alternating thrusters • Two thrusters on at any given time • Very limited time, so maximize actuation • Used to change the plane of rotation • Thruster state changes once per second. • A propellant-efficient algorithm will be used for SPHERES-TPF. Flight 4, parabola 2 Flight 4, parabola 3 Nov. 2003 KC-135 results
Simple search results • Day 4, parabola 2 • Alternating z, y, x torque commanded • Some coverage due to thrusters, some due to disturbances such as bumping walls • Sparse coverage in the -x direction, but within the half-cone angle of the beacon • Quaternion integration issues add uncertainty to validity of results • Quaternion behavior appears erratic, but rapid change is expected • Rate gyroscope saturation leads to inaccurate quaternion integration • Quaternion normalization errors also led to inaccurate integration • Video shows multi-axis rotation, as intended. Coverage maps Nov. 2003 KC-135 results
Coordinated search • Experiment description • Two spheres begin with the beacon faces offset from their common line of sight by 135°. • Both spheres initiate open-loop z-axis spins. • Acquisition occurs when one sphere hears the other’s beacon. • When a sphere hears a beacon, it sends a stop message to the other sphere. • When a sphere receives a stop message, it initiates rate damping. • Both spheres use the same algorithm. Flight 4, parabola 10 Flight 4, parabola 13 Nov. 2003 KC-135 results
Sphere 1 Sphere 2 q3 at start of rate damping q3 at start of rate damping Rate damping begins Rate damping begins Coordinated search results • Flight 4, parabola 10 • Local 0° are offset from common line by -135° • Perform +z spin at ~30°/s until acquisition/communication, followed by rate damping • Beacon half angle is ~30-45°(equivalent to 1-1.5 seconds of spin time) • Telemetry from both spheres shows expected behavior • Sphere 1 shows rate damping at z-quat≈0.6 → z-angle≈106° • Sphere 2 shows rate damping at z-quat≈0.45 → z-angle≈127° • Primary maneuver (spin search, then decelerate upon acquisition) is circled. Nov. 2003 KC-135 results
Glide slope docking experiments • Objective • Demonstrate the first phase of the docking approach computed by a glide slope algorithm • Experiment description • The two spheres maintain their orientation toward each other • The chasing sphere initiates a translation along its x-body axis to move toward the target • The algorithm is set such that docking should occur in about 8 seconds! Flight 4, parabola 19 Flight 4, parabola 29 Nov. 2003 KC-135 results
Glide slope docking results • Flight 4, parabola 19 • The first 3.5 seconds of the docking maneuver were successfully achieved • The spheres maintain relative pointing, as shown by the constant quaternions • Similar data were acquired by both spheres using their own sensors Nov. 2003 KC-135 results
Inertial property identification • Online gyro-based mass property identification • Use gyro data and calibrated thruster information to identify the error from nominal values of center of mass offset and moment of inertia • Algorithms by SPHERES team and NASA Ames • KC-135 flight goal: perform one long test over many parabolas • Allows more time for estimates to converge • Provides the most amount of raw data for download • Problem: disturbances corrupt identification • Update stops by itself when gyro saturates, no thrusters are firing, or SNR is too low • Pause/resume command used when sphere is handled Pre-flight estimated inertial properties Nov. 2003 KC-135 results
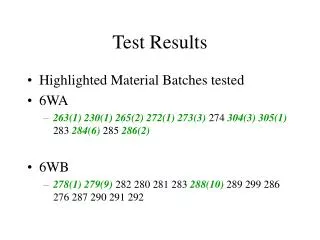
ay and az drop When proof mass Is attached Parabola 37 Parabola 38 Parabola 35 Inertia ID sample data • Estimated angular acceleration (using rate sensors) • Data are taken from parabolas 32-40, flight #4 • Green lines indicate when test was paused • Delays in pausing and unpredictable motion caused issues • Parabola 35: attached proof mass (a spare battery pack) on the -x face of the sphere • Parabola 37: replaced the full tank with one containing only 28g of gaseous CO2 (no liquid) to remove effects of propellant slosh • Parabola 38: removed the proof mass Nov. 2003 KC-135 results
~ 3.2e-3 change (expected 3.73e-3) Inertia ID results • Deviations from the previous best-estimate inertia • These are “dry” values; propellant is subtracted out • The inertia in the y (green) and z (red) axes jumps when the proof mass is added • The change is about 80% of what was expected; this is under investigation • Propellant slosh is not an issue Nov. 2003 KC-135 results
~ 5 mm change (expected 6.3) Parabola 35 Parabola 38 Parabola 37 Center of mass ID results • Deviations from the nominal CM offset. • These are “dry” values; propellant is subtracted out • Since it was impossible to filter out all handling of the sphere using pause and resume commands in real-time, the online estimate was corrupted • Saved high-frequency IMU data from the flight were used successfully in an identical off-line algorithm (accurate to floating-point precision) to produce promising results for both inertial and CM estimation. Nov. 2003 KC-135 results
Lessons learned • Care must be taken when integrating separate tests into one program • Tests being integrated in one program must have compatible initialization settings • Special attention is required when the tests are written by different individuals • Unexpected infrared noise causes confusing behavior • We have identified a series of fixes for use in any future KC flights • IR-opaque, visible-transparent sheeting on lights (will also improve video quality) • Form-fitted, pre-cut curtains to block IR from other experiments • Point laptop screen away from test area • We expect these fixes to fully alleviate all infrared problems • Recent test results on the ISS suggest that infrared noise will not be a problem; however, experiences like this continue to help us better understand noise sources and to identify new ways to address the issue if it arises. • SPHERES core code changes • Static variables must be explicitly initialized at the start of each test, not just at the start of the program • Order of process initialization problems manifested on flights as corrupt IMU data • Identified problem and fixed by changing initialization procedure • Will add data to the telemetry stream to notify us of suspected IR noise. Nov. 2003 KC-135 results
Conclusion • Objectives accomplished • Showed that the attitude control algorithm works as expected in 3D • Validated critical maneuvers and demonstrated key components of the “lost in space” sequence • Open-loop search • Beacon acquisition • Intercommunication • Stop and hold response • Beacon tracking • Saved precious experiment time on ISS • Gained confidence in current algorithms, and identified areas for improvement prior to flight. • Improved the inertia and center of mass estimates of the spheres. Nov. 2003 KC-135 results