Download
1 / 28
340 likes | 760 Views
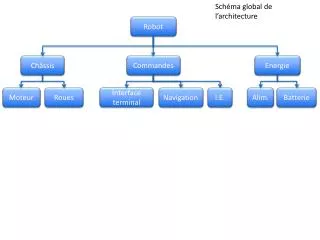
Robot Delta. Gilberto Reynoso Meza. Tópicos a Desarrollar. Descripción, Antecedentes y Características Usos y Aplicaciones Modelo Cinemático Modelo Dinámico. Descripción, Antecedentes y Características.

E N D
Robot Delta Gilberto Reynoso Meza
Tópicos a Desarrollar • Descripción, Antecedentes y Características • Usos y Aplicaciones • Modelo Cinemático • Modelo Dinámico
Descripción, Antecedentes y Características • El Robot Manipulador Delta pertenece a la familia de Robots Paralelos o de Cadena Cinemática Cerrada. • Los Robots comerciales son, en su mayoría, Robots Seriales o de Cadena Cinemática Abierta.
Descripción, Antecedentes y Características • El Diseño del Manipulador Delta se le adjudica a Reymond Clavel en 1990. El mismo se encuentra documentado en la patente 4,976,582 del Gobierno de EUA.
Descripción, Antecedentes y Características Tal y como lo describe la patente, el Manipulador consta de: Una base Fija (1) Una base Móvil (8) Tres brazos de Control (4) Tres Actuadores (13) Seis Eslabones de movimiento libre (5a,5b) Actuador Final (9, 10)
Descripción, Antecedentes y Características • La familia de los Manipuladores Paralelos se caracteriza por lo siguiente: • Mayor Precisión y Rigidez debido a su estructura paralela. • Sus componentes están sometidos principalmente a esfuerzos de tensión y compresión. • Altas aceleraciones, debido a las pocas masas en movimiento. • Relación Sistema/Espacio de Trabajo baja en comparación a los manipuladores seriales. • Existencia de Singularidades en el espacio de trabajo.
Usos y Aplicaciones • R. Clavel en su patente describe al manipulador como “un dispositivo para el movimiento y posicionamiento de un objeto en el espacio”. • La primer aplicación, la cual motivo su desarrollo, fue en el empaquetamiento de galletas de chocolate.
Usos y Aplicaciones • Debido a su diseño, la plataforma móvil nunca cambia su orientación, por lo que el Delta se convierte en un manipulador capaz de operar en un espacio de trabajo sin cambiar la orientación de su efector final.
Usos y Aplicaciones • Las aplicaciones actuales cuentan: • Empaquetamiento secundario de Productos • Máquinas Herramienta • Equipo Médico
Quickstep HS 500 High Speed Cutting Aceleración: 2g V.T. : 630 x 630 x 500 Urane SX Drilling Machine Aceleración: >3.5g V.T. : 500 x 500 x 200 Control: Siemmens
Index V100 Turning Aceleración: 1g Pegasus WoodWorking Aceleración: 1g V.T. : 5000x1400x200
Demaurex Handling Aceleración: 4g V.T. : 600 x 600 x 160
Modelo Cinemático • Cinemática • Herramientas para su Desarrollo • Planteamiento del Modelo • Desarrollo del Modelo • Implementación
Cinemática • La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. La cinemática se interesa por la descripción analítica del movimiento espacial del robot como una función del tiempo.
Cinemática Directa • Consiste en determinar la posición y orientación del extremo final del robot con respecto al sistema de la base del robot a partir de conocer los valores de las articulaciones y los parámetros geométricos
Cinemática Inversa Resuelve la configuración que debe adoptar el robot para una posición y orientación conocidas del extremo.
Herramientas para la Cinemática • Métodos Geométricos • Matrices de Transformación Homogénea • Convención Denavit Hartemberg • Tornillos Infinitesimales • Teoría de Cuaternios
A O C B E Planteamiento del Modelo • Sean: I = {1,2,3}, subíndice para cada brazo del robot.
A O C B E Planteamiento del Modelo a : Orientación AB con respecto a la horizontal XE, YE, ZE : Posición final del actuador XCi, YCi, ZCi : Posición equivalente de cada brazo en la base móvil : Rotación equivalente entre brazos
Desarrollo del Modelo Inverso • Dado que el punto Bi pertenece al lugar geométrico de puntos definidos por la esfera de Radio BiCi con centro Ci, es posible definir la siguiente relación: • En dicha relación, es posible representar X,Y,Z en función de los parámetros de forma del manipulador y del ángulo alpha requerido.
Modelo Dinámico • Dinámica • Herramientas para su Desarrollo • Planteamiento del Modelo • Desarrollo del Modelo
Dinámica • La dinámica del robot se ocupa de la relación entre las fuerzas que actúan sobre el robot y el movimiento resultante en el mismo. • Dicho Modelo relaciona la localización del robot, su velocidad, su aceleración, las fuerzas y pares en cada articulación y sus parámetros dimensionales.
Dinámica Directa e Inversa • Modelo Dinámico Directo: Expresa la evolución temporal de las coordenadas articulares del robot en función de las fuerzas y pares que intervienen. • Modelo Dinámico Inverso: Expresa las fuerzas y pares que intervienen en función de la evolución de las coordenadas articulares y sus derivadas.
Herramientas para la Dinámica • Método Newton-Euler • Planteamiento Lagrangiano • Algoritmo Lagrange-Euler • Principio de Trabajo Virtual • Teoría Espacio Estado
Desarrollo del Modelo Directo • Simplificaciones a Considerar: • Las inercias rotacionales de los antebrazos son despreciables. • Las masas de los antebrazos son separadas en sus dos extremidades, de forma que en la junta B se concentran 2/3 de la masa, y en la junta C el tercio restante. • Efectos de fricción y elasticidad no son considerados.
Matriz Jacobiana • Se conoce con este nombre a la matriz que relaciona las velocidades de las coordenadas articulares del robot con las coordenadas espaciales de su actuador final. • Jacobiana Directa: Relaciona las velocidades articulares con las del extremo del robot. • Jacobiana Inversa: Relaciona las velocidades del extremo del robot con sus coordenadas articulares.
Modelo Dinámico • Vector de Torques (G) • Torque debido a la gravedad en los antebrazos (GG) • Matriz de inercia de los antebrazos (I b) • Aceleración gravitacional sobre la masa del manipulador (GE) • Aceleración espacial de la base móvil (Fn) • Matriz Jacobiana (J)
Trabajo Restante • Programación del Modelo Cinemático Directo • Programación del Modelo Dinámico en MatLab • Programación del Modelo Dinámico en Adams View + Adams Control • Evaluación de Estrategias de Control