Download
1 / 40
430 likes | 828 Views
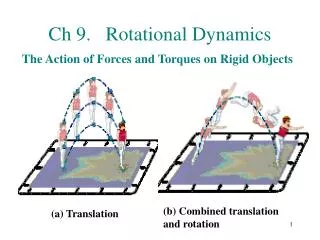
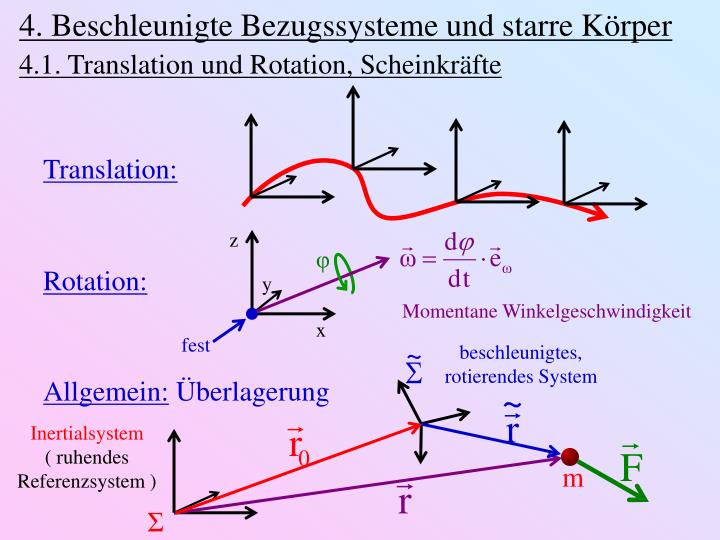
z. φ. Rotation:. y. Momentane Winkelgeschwindigkeit. x. fest. beschleunigtes, rotierendes System. Inertialsystem ( ruhendes Referenzsystem ). m. Σ. 4. Beschleunigte Bezugssysteme und starre Körper 4.1. Translation und Rotation, Scheinkräfte. Translation:. Allgemein: Überlagerung.

E N D
z φ Rotation: y Momentane Winkelgeschwindigkeit x fest beschleunigtes, rotierendes System Inertialsystem ( ruhendes Referenzsystem ) m Σ 4. Beschleunigte Bezugssysteme und starre Körper 4.1. Translation und Rotation, Scheinkräfte Translation: Allgemein: Überlagerung
beschleunigtes, rotierendes System Translation Rotation Inertialsystem ( ruhendes Referenzsystem ) Dynamik: m Σ Trägheitskräfte („Scheinkräfte”) Kinematik (vgl. Theorie):
Anzeige der Waage: Realisierung: m Freier Fall: „Schwerelosigkeit” Waage Rakete: Sturzflug: (falls Masse an Waage fixiert) Beispiel 1:Geradlinig beschleunigte Bewegung
m z y Coriolis-Kraft Zentrifugal-kraft x Coriolis-Kraft: v-abhängig Zentrifugalkraft: radial, -abhängig . m Zentrifugal-kraft Beispiel 2:Gleichförmige Rotation
Schwerelosigkeit im Orbit F = 0 Beispiel: Raumfahrt Künstliche Schwerkraft „Unten“ = radial ω
1. Sichtweise: in Erde, nicht rotierend Kreisbewegung 2. Sichtweise: erdfest, rotierend feste Position ( Kräftefreiheit ) 3. Sichtweise: im Satellit, nicht rotierend feste Position ( Kräftefreiheit ) Geostationäre Bahn:Satellit Erde
Gravitationskraft des Mondes Zentrifugalkraft durch Rotation um Schwerpunkt Erde Schwerpunkt: Σ Mond Flutberg Flutberg Beispiel:Geodit (Erdform) Rotationsellipsoid definiert NN (Normal-Null), RÄquator RPol 20 km Beispiel:Gezeiten
Pendelebene (Aufsicht, Nordhalbkugel) : Corioliskraft Beispiel: Foucault-Pendel Berlin: 52,5 TS 30,25 h S 11,9 h Erde Pendel hängt „schief“ Σ: Erde dreht sich unter Pendel durch
Homogene Körper dm dV M O 4.2. Dynamik des starren Körpers 4.2.1. Bewegung des starren Körpers Def.:Starrer Körper System von Massenpunkten fester Relativkoord. • Komponenten der Bewegung: • Translation: Massenpunkte laufen auf kongruenten Bahnen • Rotation: Massenpunkte laufen auf konzentrischen Kreisen
Def.:Massenmittelpunkt (MMP) Folgerung:Gesamtimpuls Bewegungsgl.: Translationsbewegung: Der MMP bewegt sich wie ein Massen- punkt der Masse M unter dem Einfluss der externen Kräfte. Dieser Teil ist also gewöhnliche Punktmechanik. Dieses Kapitel: Rotationsbewegung um den ruhenden MMP
. MMP Mg Experimentelle Bestimmung des Massenmittelpunkts: Stabile Lage Experiment: MMP
MMP MMP MMP Mg Mg Mg Experiment: Stabilität des schiefen Turms stabil labil instabil
Def.:Trägheitsmoment (bezüglich der Drehachse) dm Folgerung: 4.2.2. Rotationsenergie r Drehachse (nicht notwendig um MMP)
R Achse z L 0 Vergleich: Vollzylinder: Hohlzylinder: Vollkugel: Hohlkugel: 0,4 : 0,5 : 0,667 : 1 Beispiel: Vollzylinder ( Tafelrechnung)
M Δt Energiebilanz ( Tafelrechnung ) ω h Abrollender Faden M Zylinder auf schiefer Ebene Beispiel:„Rollende“ Zylinder
Beispiel:Maxwell-Rad M Faden Drehachse 2r m R h M Tafelrechnung
Totale kinetische Energie: Rotation um MMP: Translation von MMP: (Kreisbewegung um Achse) MMP Drehachse (nicht um MMP) Rotation um Drehachse: Steinerscher Satz: Folgerung:Steinerscher Satz S Es reicht, Drehachsen zu betrachten, die durch den MMP gehen. Die Übersetzung auf parallelverschobene Achsen ist trivial.
Masse m Trägheitsmoment (bzgl. Drehachse) Geschwindigkeit Winkelgeschwindigkeit Kinetische Energie Rotationsenergie 4.2.3. Drehmoment und Drehimpuls( vgl. Theorie) Translation Rotation
Impuls Drehimpuls Kraft Drehmoment Bewegungsgleichung Translation Rotation
Referenzpunkt Bewegungsgleichung der Rotation: Folgerung:Drehimpulserhaltung Wirken keine äußeren Drehmomente auf einen Körper (bzgl. eines Referenzpunktes), bleibt der Drehimpuls (bzgl. des Referenzpunktes) konstant.
Steinerscher Satz R R R0 M, J Teller (Tafelrechnung) Dreh-achse φ Rückstell-feder t Periode T Beispiel: Drehschwingungen φ
T2 R2 α
Experiment:Rolle mit Faden Kein Drehmoment
Trägheitstensor und • Trägheitstensor Körpereigenschaft, unabhängig von Drehachse • symmetrisch: • positiv definit: 4.2.4. Trägheitstensor( vgl. Theorie) in Komponenten mit
S präzediert um es wirkt „Unwucht” Beispiel:Rotation des H2-Moleküls H H Feste Drehachse
Spezialfall: Drehung um Symmetrieachse S Beispiel:Körper mit Rotationssymmetrie Töpferei Schwerpunkt liegt auf Symmetrieachse
Folgerung: Folgerung: Zusammenhang von J bzgl. Drehachse mit Tensor :
Definition:Trägheitsellipsoid alle mit P Tafelrechnung steht senkrecht auf Trägheitsellipsoid i.a. gilt z y x
z y Hauptträgheitsmomente (HTM) x große Halbachse mittlere Halbachse kleine Halbachse Folgerung: falls Hauptachsen des Trägheitsellipsoiden: Drehung ( x , y , z ) ( , , ) sodass ζ ξ η Hauptachsen ξ, η, ζ stehen senkrecht auf Oberfläche
ζ η ξ N η ζ ξ O O NO2 - Molekül Buch η ζ ξ ξ a η a ζ ξ ξ Kugel Würfel η η ζ ζ Definition: Asymmetrische Kreisel:Jζ Jη Jξ Jζ Symmetrische Kreisel:2 HTMe gleich, z.B. Rotationskörper Prolate Kreisel: Jζ< Jη Jξ Oblate Kreisel: Jζ Jη Jξ Sphärische Kreisel:Jζ Jη JξTrägheitsellipsoid Kugel
Wegen folgt: (samt Entartung bei Symmetrie) Stabilität freier Achsen:( vgl. Theorie) große Halbachse stabil gegen kleineStörung mittlere Halbachse instabil kleine Halbachse stabil Definition:Freie Achsen Mögliche Drehachsen ohne äußere Drehmomente
4.3. Der Kreisel Bisher: feste bzw. freie Drehachse Kreisel: fester Punkt, bewegliche Drehachse • Beispiele: • kräftefreie Körper fester Massenmittelpunkt (MMP) • gestützter Kreisel Unterstützung in S kräftefreier Kreisel Schwerpunkt S Unterstützung jenseits S Gravitation Drehmoment Präzedierender Kreisel
Symmetrieachse = Figurenachse= Hauptachse Drehachse (körperfest) (im raumfesten System) S körperfestes, rotierendes Hauptachsensystem Jx Jy 4.3.1. Kräftefreier symmetrischer Kreisel z y Nutation x
liegt auf Schnittkurve • Ellipsoid rotiert im raumfesten System um raum- und körperfeste Kugel: • rotiert im körperfesten System um Schnittkurve körperfester Ellipsoid: Nutation von Figurenachse und Drehachse: Lx , Ly , Lz: körperfeste Komponenten Lz Ly Lx
Rastpolkegel, Öffnungswinkel βα (Ort der momentanen Drehachse) z α α Lz Jz· ωz β β Nutationskegel Öffnungswinkel α Gangpolkegel, Öffnungswinkel β (rollt auf Rastpolkegel ab) Nutation im raumfesten (nicht rotierenden System): Figurenachse z
4.3.2. Präzession des symmetrischen Kreisels Betrachte Figurenachse keine Nutation Tafelrechnung i) Präzession des Gyroskops: Faden m Laufachse S
α ωP α ( const. ) S α Tafelrechnung ii) Kinderkreisel
Drehmoment durch Erddrehung Erddrehung ωE Ost West iii) Kreiselkompass Nord – Süd – Ausrichtung
Sonnenanziehung Zentrifugalkraft Sonnenanziehung Zentrifugalkraft 23,5° S1 zur Sonne Ekliptik (Ebene der Erdumlaufbahn um die Sonne) S2 Zusätzlich: Rotationsachse Figurenachse Nutation iv) Erdpräzession Erde (Rotationsellipsoid)