Download
1 / 24
240 likes | 415 Views
Vodenje PMSM s Hall-ovim dajalnikom. Predstavitev Individualnega Raziskovalnega Dela. IRD 4. Maribor, 21.02.2006. Evgen Urlep. Vsebina. Uvod Model PMSM Shema vodenja Vodenje v šestkoračnem načinu Opazovalnik rotorskega magnetnega sklepa Vpliv sprememb parametrov

E N D
Vodenje PMSM s Hall-ovim dajalnikom Predstavitev Individualnega Raziskovalnega Dela IRD 4 Maribor, 21.02.2006 Evgen Urlep
Vsebina • Uvod • Model PMSM • Shema vodenja • Vodenje v šestkoračnem načinu • Opazovalnik rotorskega magnetnega sklepa • Vpliv sprememb parametrov • Korekcija kota opazovalnika • Eksperimentalni rezultati • Zaključek
Uvod • Vodenje PMSM zahteva poznavanje rotorskih veličin. • Rekonstrukcija rotorskih veličin je možna iz statorskih ob pomoči modela motorja z uporabo opazovalnika. • Neobservabilnost onemogoča uporabo v področju hitrosti nič. • Informacija iz hall-ovih senzorjev omogoča le omejeno zmogljivost vodenja. Cilj je potrditi: • Kombinacija uporabe opazovalnika z dodatno informacijo iz hall-ovih senzorjev izboljša zmogljivost vodenja.
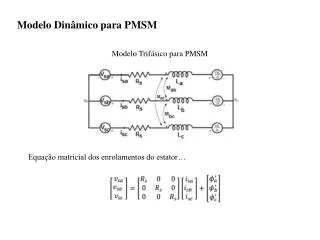
Model PMSM Model motorja s trajnimi magneti brez izraženih polov Statorskanapetost Rotorski magnetni sklep Inducirana napetost Navor (s) Stacionarni koordinatni sistem (a,b)
Razklopitev Vodenje v orientaciji rotorskega magnetnega sklepa • Tokovna regulacija v koordinatah rotorskega magnetnegasklepa • Razklopitev med osemi d in q s predkrmiljenjem • Opazovalnik je uporabljen za določitev kota in hitrosti rotorja
Delovanje v šestkoračnem načinu Pogrešek v kotu vpliva na valovitost navora in povzroča tokovne konice ob komutaciji
Vpliv pogreška kota na pogrešek navora Ocenjen navor Dejanskinavor Pogrešek kota Tok je transformiranna d-q koordinatni sistem(r)ocenjenega kota
Opazovalnik rotorskega magnetnega sklepa Korekcija amplitude - občutljiv na spremembe statorske upornosti -zahtevano je poznavanje začetnega pogoja IRD2
Vpliv sprememb parametrov - Pogrešek v induktivnosti vpliva v višjem frekvenčnem področju - Pogrešek v napetosti in upornosti vplivata v nizkem frekvenčnem področju
RSe=1.1RS Ted=0.5 Nm wc=4 rad/s Vpliv spremembe Rse na kot Odstopanje Rse obremenjenega pogona povzroča pogrešek kota
Opazovalnik rotorskega magnetnega sklepa Korekcija kota Korekcija amplitude
Določitev ojačanja Kh Linearizirana prenosna funkcija zaprte zanke Ojačanje Khob D=1
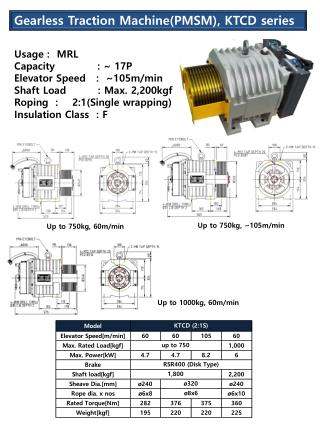
Eksperimentalni sistem • Krmilnik bremena • Semikron • DSP-2 • Krmilnik pogona • MOSFET most • (skuter) • eZdsp-2812 Pogon PMSM AMG6308 Un=48 V Pn=0.8 kW p=6 Rs=0.15 , Ls=237 H, PM=0.02 Vs Breme IM Un=24 V In=30 A p=2
Korekcija kota we=5 rad/s
Vklop pogona med vrtenjem we=70 rad/s
Izmerjen in opazovan kot ob reverziranju we=[-10..10] rad/s a=-3 rad/s2 Ted=0.5 Nm
Pogrešek kota ob počasnem zaviranju RSe=1.1RS Ted=0.5 Nm Estimation Acuracy Frequency Rresponse
Stopnična obremenitev pri hitrosti nič we=0 Ted=1 Nm
Zaključek Kombinacija opazovalnika in informacije hallovega senzorja izboljša obratovanje pogona • Ni nihanja navora zaradi pomanjkljive informacije dajalnika (šestkoračni način) • Pogrešek kota je manjši od 60 stopinj • Manjša občutljivost na spremembe parametrov zaradi korekcije kota • Omogočen vklop vodenja ob vrtečem se rotorju • Stabilno delovanje ob hitrosti nič tudi ob nazivnem navoru
PLL estimator hitrosti Prenosna funkcija estimatorja Eq. 21