Download
1 / 20
200 likes | 214 Views
This overview discusses the comparison between rotational and translational motion in physics, covering key concepts such as kinematics, dynamics, work, energy, momentum, and vectors. Explore how these essential principles connect and differ in the context of linear and angular motion. Understand the fundamental equations, laws, and variables that define the behavior of objects in rotation and translation. Gain insights into torque, forces, inertia, and the relationship between linear and angular quantities. Dive into topics like circular motion, frames of reference, and types of velocity to enhance your understanding of mechanical principles.

E N D
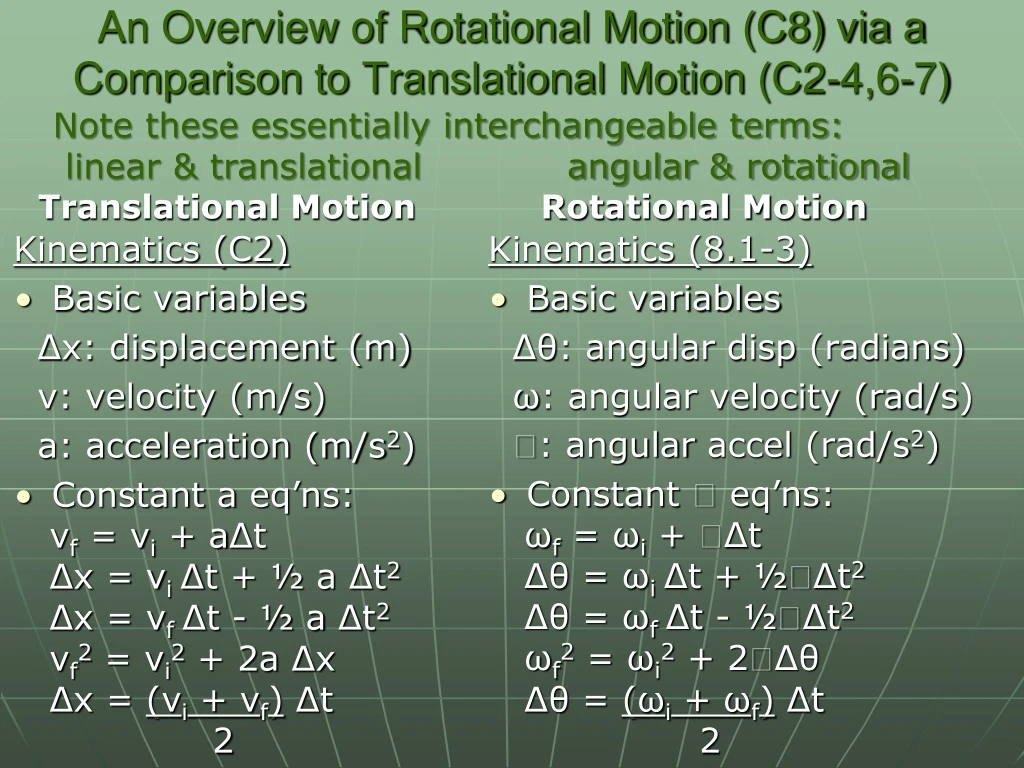
An Overview of Rotational Motion (C8) via a Comparison to Translational Motion (C2-4,6-7) Note these essentially interchangeable terms: linear & translational angular & rotational Translational Motion Rotational Motion Kinematics (8.1-3) Basic variables Δθ: angular disp (radians) ω: angular velocity (rad/s) : angular accel (rad/s2) Constant eq’ns: ωf= ωi+ Δt Δθ= ωiΔt + ½Δt2 Δθ= ωf Δt - ½Δt2 ωf2= ωi2+ 2Δθ Δθ= (ωi+ ωf)Δt 2 Kinematics (C2) • Basic variables Δx: displacement (m) v: velocity (m/s) a: acceleration (m/s2) • Constant a eq’ns: vf= vi + aΔt Δx = vi Δt + ½ a Δt2 Δx = vfΔt - ½ a Δt2 vf2= vi2 + 2a Δx Δx = (vi + vf)Δt 2
Connection Between Translational and Rotational Variables Define radian: angle subtended by an arc of the unit circle, where l = r, so θ = l /r = 1 radian no actual units on θ – radians & degrees are not true units, but labels to tell which scale was used but can convert between them by 1 rev = 360° = 2π radians = 6.28 radians so 1 radian ≈ 57° To convert from a linear to a rotational quantity: since 1 rev = 2π(in radians) = 2πr(adius) then linear quantity = r(adius) ∙ angular quantity so Δx = r∙Δθ ; v = r∙ω ; a = r∙ also v as f (in rps) ∙ 2π(in radians) /1 rev = ω(in rads/s)
Translational Motion Rotational Motion Dynamics (8.4-6) Torques - - cause rotation when applied at distance, r, from axis of rotation = r x F Moment of inertia – I – is tendency to resist changes in rotation; aka angular acceler depends on mass in kg & distribution of mass in m2 N2ndL for Rot: Σ = I where I = c mr2 in kgm2 see pg 208: c depends on object shape & loco axis of rot Dynamics (C4) Forces - F - cause acceleration when applied to axis containing the CM Inertia – m – tendency to resist changes in motion; aka acceleration depends on mass in kg N2ndL: ΣF = ma
Translational Motion Rotational Motion Work by Torque (8.7) W = ● Δθ = (r x F) ● (Δx/r) and P = ● Δθ/Δt = ●ω Then comparatively: = r x F is a cross product = rFsinθ in mN so max torque when r & F are and = 0 when r & F are parallel makes sense because ll F would cause a, not rotation… Work by Force (C6) W = F ● Δx & Power = W/Δt = F ● v Also recall: W = F●Δx is dot product = FΔxcosθ in Nm so max work when F & Δx are parallel and W = 0 when F & Δx are
Translational Motion Rotational Motion Energy (8.7) KErot= ½Iω2in kgm2/s2 Angular Momentum (8.8) L = I ω ΔL = IΔωor ΔIω= ΣΔt Law of Conservation of L: if Σext= 0, then ΔL = 0 and Li= Lf Energy (C6) KElin = ½mv2 in kgm2/s2 Linear Momentum (C7) p = mv Δp = mΔv or Δmv = ΣFΔt Law of Conservation of p: if ΣFext = 0, then Δp = 0 and pi = pf
Translational Motion Rotational Motion Vectors (8.9) directions must be defined r: out from & to axis of rot I is scalar – dot prod of r2 Δθ, ω, L along axis of rot, by 1st (easy) RHR , ,ΔL in same direction as ω; if ω & turning CCW ω & turning CW oppodirection as ω; if ω & turning CW ω & turning CCW by 2nd (harder) RHR Rotational Momentum (8.8) Vectors (C3) directions can be seen, witnessed, experienced except for a… which is more like rotational…
Right Hand Rules for Rotational Motion 1stRHR: fingers curl in direction of rotation thumb points in direction of Δθ, ω, L 2nd RHR: fingers point in direction of r palm points in direction of F thumb points in direction of , ,ΔL
Translational Motion Rotational Motion Frames of Ref (Appendix C) inertial – not rotating, so N’s Laws good non inertial – rotating, so feel fictitious force like Coriolis force in N. hemi – CCW spin in S. hemi – CW spin weak, but present in large air & water masses Frames of Ref (C 2-7) inertial – not aing, so N’s Laws good non inertial – aing, so feel fictitious force like centrifugal…
Circular Motion (C5) vs. Rotational Motion (C8)?? Circular Motion revolution about an external axis caused by a centripetal force that must be constantly applied otherwise the object will move off tangent as Newton’s 1st Law dictates Ex: stopper on a string Earth’s year about the sun merry-go-round? for the rider…
Circular Motion (C5) vs. Rotational Motion (C8)?? Rotational Motion rotation about an internal axis; aka spin caused by a torque that once applied, the object will continue with that rotation as the Law of Conservation of Angular Momentum dictates Ex: Ice skater in “final” spin Earth’s day on its own axis child’s top merry-go-round – for the structure
Types of Velocity (Linear) Velocity – rate at which displacement is covered eq’n: v = Δx/Δt units: m/s Tangential Velocity – rate at which distance is covered as something moves in a circular path – so the distance would amount to some multiple of the circumference of a circle eq’n: v = 2∏r/T, tangent to circle units:m/s Linear & tangential speed measure essentially the same thing, but for an object moving in a circle Angular Velocity (ω) – aka rotational velocity – rate at which something rotates eq’n: ω =Δθ/Δt units: radian/s, rev/s, rpm
Rigid body – any object whose particles maintain the same position relative to each other during motion/rotation. Non rigid examples: For a rigid body, points closer to the axis of rotation have less tangential speed same rotational speed Sometimes groups of people try to act like a rigid body: Ex: planes in formation marching Band in parade formation Ice Capades or a Rockettes performance
Rotational Inertia Recall moment of inertia (I = cmr2) It is often referred to as rotational inertia – tendency for an object to resist a change in its state of rotation dependent on mass (m) & on distribution of mass (c r2) close to axis much less I far from axis much more I N 2nd L for Rotation ( = I ) an external net torque ()is required to change an object’s rotation - to give it rotational acceleration ()
ex: meter sticks with movable masses pole with movable mass choking up on a bat, club or drumstick straight vs well bent legs
more ex: tightrope walker, with vs without pole long/heavy tail on an animal dinosaurs, kangaroos monkeys, cats various shape objects racing down an incline
When an object slides down a frictionless incline PEtop = KElinat bottom But when an object rolls, it takes some of its NRG just to spin (KErot), so then there’s not as much left to move it down the plane (KElin) PEtop = KEroll at bottom = KErot at bot + KElin at bot But how much of each KErot & KElindoes it have? It depends on object’s rotational inertia (I) which depends on object’s distrib of mass: If mass is distributed far from the axis, then more I, so more KErot leaving less KElin to move along ramp, so it loses the race.
But does mass or size (radius) matter? Recall: KErot= ½Iω2 and I = c mr2 while ω = v/r so KErot = ½ c mr2 (v/r)2 So radius cancels (doesn’t matter), leaving us with KErot= ½ c mv2 And when you put it all together for a given object at the top of a ramp: PEtop = KErot at bot + KElin at bot mghtop= ½ c mv2 + ½mv2 so mass cancels too! So for a particular h, what determines which object will have the greater v (win), is its smaller “c” value which is only based on shape & axis of rot (p. 208)
Angular Momentum A cool result of an object having angular momentum: the object becomes incredibly stable and balances itself! This is due to the nature of the vectors in rotational motion. They actually act as a force to balance out gravity, which would otherwise topple the object.
Angular Momentum Ex: child’s toy top gyroscope basketball plates on top of a tall rod bicycle wheels
Conservation of Angular Momentum Law of Conservation of Angular Momentum – for an isolated* system the amt of L is a constant * forces to the CM ok since they don’t cause rotation, but no torques allowed! Recall: L = I ω; so for an isolated rotating object, if it redistributes its mass (changes I), then its rotational speed (ω) will change inversely Ex: Rotating Platform with arms out, that’s a larger I, so your ω gets smaller to compensate Other ex: flips in gymnastics & diving spins in figure skating falling cat lands on its feet quarterback twisting during a throw

![Actual C8 Exam [PDF] Sample Questions Answers](https://cdn4.slideserve.com/7890385/worldatwork-dt.jpg)