Download
1 / 18
180 likes | 218 Views
Explore the quantification of limb motion, analysis of forces and moments, and kinetic principles of running and walking. Understand the transition from walking to running and the mechanics of bipedal and quadrupedal gaits.

E N D
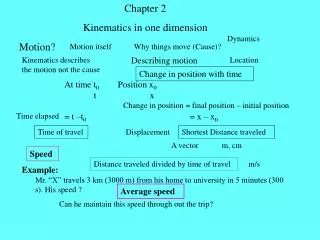
Lecture # 16: Running and Walking Edward Muybridge 1830-1904 Locomotor kinematics = quantification of limb and body motion Locomotor dynamics = analysis of forces and moments
Inverted pendulum = one stride kinetic gravitational potential frictionless pendulum swings forever exchange kinetic & potential energy Walking
Walking y Dy q v h, height of center of mass one stride h mgh (GPE) G.P.E. & K.E. are out of phase(exchange possible) v ½ mv2 (KE) stride 1 stride 2 • Walking • No aerial phase • exchange ofG.P.E. and K.E.
Simulated Biped Robotic Biped
v0 requiredcentripetal acceleration = v02/L L What keeps mass following this arc? Walking Walking Only source of downward acceleration is g. Therefore, mass follows arc if g > v02/L Only source of downward acceleration is g. Therefore, mass follows arc if g > v02/L…. …or v02/gL < 1 v02/gL is called Froude number (a dimensionless #), also defined as ratio of inertial to gravitational forces. DETERMINES WALK-TO-RUN TRANSITION!
v0 L Walking Walking Example 1: Does this work for humans? What is predicted walk-to-run transition speed? V = (gL)-½ L = 0.9 m g = 9.8 m/s2 V = 3 m/s – ‘jogging’ speed for most people Example 3: What is walk-to-run transition for ant? V = (gL)-½ L = 0.001 m g = 9.8 m/s2 V = 0.1 m/s ~ 100 body lengths for humans ~ 3 body lengths Example 2: What is walk-to-run transition on moon? V = (gL)-½ L = 0.9 m g = 0.17 x 9.8 = 1.6 m/s2 V = 1.2 m/s – ‘jogging’ speed on moon
Running spring mass model = stance swing stance swing
stance swing -y dx/dt = constant x height, h L h GPE -k DLEPE E.P.E. & K.E. are partially out of phase(exchange possible) Uvert dy/dt KE KE-EPE exchange KE-EPE exchange ballistic ballistic Running
actuator (muscle) structural element (bone) tensile element (ligament /tendon) elastic element (tendon)
duty factor = stance stance+swing stance swing Left Right Run d.f. < 0.5 aerial phase Left Right Hop 0< d.f.<1 Left Right Running Walk d.f. >0.5 Gaits
duty factor = stance stance+swing Walk always 3 feet on ground Left Front Left Hind Right Front Right Hind Run aerial phase Left Front Left Hind Right Front Right Hind Quadrapedal Gaits (trot)
Run aerial phase Left Front Left Hind Right Front Right Hind Run aerial phase Left Front Left Hind Right Front Right Hind (pace) (bound)
(gallop) Run aerial phase Left Front Left Hind Right Front Right Hind
COM Left Front Left Middle Left Hind Right Front Right Middle Right Hind Hexapedal Gait = Tripod