Download
1 / 17
170 likes | 189 Views
Explore the working principle, local reconstruction, and resolution of the Transition Radiation Detector (TRD) at ALICE. Learn about the TRD characteristics, energy losses, and challenges of tracking in a high-density environment. Discover the innovative TRD tracking techniques and tracklet search principles.

E N D
Tracking in High Density Environment JouriBELIKOV (CERN)PeterHRISTOV (CERN)MarianIVANOV (CERN)KarelSAFARIK (CERN)
Outlook • The ALICE detector description • ALICE Transition Radiation Detector (TRD) • Working principle • Local reconstruction • TRD tracking algorithm • Results
HMPID PID (RICH) @ high pt PMD g multiplicity TPC Tracking, dEdx MUON m-pairs The ALICE Experiment TOF PID TRD Electron ID, Tracking PHOS g,p0 ITS Low pt tracking Vertexing
The TRD Characteristics • 18 super modules • 6 radial layers • 5 longitudinal stacks • 540 chambers • 750m2 active area • 28m3 of gas Each chamber: ≈ 1.45 x 1.20m2 ≈ 12cm thick (incl. Radiators and electronics) in total1.18 million read out channels
Working Principle of the TRD • Drift chambers with FADC readout at 10MHz combined with a fiber/ foam sandwich radiator in front. • Transition Radiation (TR) photons (< 30keV, only for electrons) are absorbed by high-Z gas mixture (Xe,Co2) large clusters
Local Reconstruction • For each time bin (X direction) the position of the cluster along the pad rows (Y direction) is reconstructed: • Lookup table (amplitudes of the maximum and the two neighbors) used instead of COG to minimize non-linearity's • Fast calculation, better precision than a Mathieson fit. • The track parameters are obtained from a straight line fit.
Precision of Local Reconstruction Resolution Cluster RMS • Y-Position resolution is determined by the S/N ratio and by the incident angle • Resolution is not proportional to the cluster’s RMS • Better estimate of uncertainty during tracking – knowing incident angle • Uncertainty in x-coordinate (time) • Width of time response function (local – on cluster level) • Unisochronity effect and non-homogeneity of drift velocity (global shift of tracklet) • Signal shaping (software tail cancellation) before local reconstruction • Reduction of the uncertainty in x • Local Signal processing Unisochronity
TOF TRD TPC ITS Combined Tracking • Combining tracking - Iterative process • Forward propagation towards to the vertex –TPC-ITS • Back propagation –ITS-TPC-TRD-TOF • Refit inward TOF-TRD-TPC-ITS • Continuous seeding and track segment finding in all detectors • TRD tracking • Back propagation to TOF – all clusters are considered • Refit inward • Starts from the last chamber before crossing the frame or from the last “gold tracklet”
TRD Tracking: Challenge • High density environment ~ about 1.5 clusters in track road • Significant material budget in the TRD volume • Fraction of tracks is absorbed ~ 35% • Mean energy losses ~15 % of energy Material budget Absorption points Fraction of non absorbed tracks
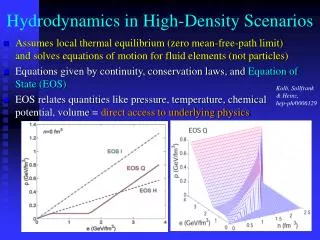
Energy Losses in the TRD • Left side – relative energy loss in TRD detector • Integrated over all tracks reached TOF - Hijing events • Right side – precision of dEdx correction
Energy Losses: Correction • TGeoManager used to get information necessary for energy loss calculation and multiple scattering • Local information: density, radiation length, Z, A defined in each point • Mean query time ~ 15 ms • Mean number of queries • ~15 – between 2 ITS layer • ~15 – between 2 TRD layers • Two options considered • 1. Propagate track up to material boundary defined by modeler – get local material parameters • Time consuming - too many propagations and updates of the track • 2. Calculate mean parameters between start and end point • <density>, <density*Z/A>, <radiation length> • Faster (only one propagation), reusable in case of parallel hypothesis
TRD Tracking • TRD tracking in high density environment • Non combinatorial Kalman filter (tracks from TPC): 120 propagation layers in 6 planes • Riemann sphere fit for TRD standalone tracking and seeding • Cluster association replaced with tracklet search in each plane • High flux ~ 1.5 clusters in the road defined by cluster and track positions uncertainty • Chi2 minimization for full tracklet not for separate clusters • Several hypothesis investigated Tracklet: set of clusters belonging to the same track in one chamber
Tracklet Search: Principles • R-phi resolution on the level of 0.04 cm • Track extrapolation has ~ 2 times worse resolution than the tracklet resolution • Z - rectangular distribution given by length of pads (+-5 cm) • Probability to cross the pad-row on the level of 15 % - (3.6cm*tan(q)/10cm) • Track can cross the pad-row once at maximum Clusters in road - R – phi projection Clusters in road - Z projection
Tracklet Search • Combinatorial algorithm too expensive • Case of 2 tracks in road – 1 million combinations • Reduction – restricting number of row-crossing points (1 maximum) • Iterative algorithm: • 1 approximation - closest clusters to the track taken • Resolve trivial z swapped clusters • { • Tracklet position, angle and their uncertainty calculated • Weighted mean position calculated (tracklet+ track) • Chi2 calculation for tracklet • Closest clusters to the weighted mean taken • } • Projection algorithm • Loop over possible change of z direction • { • Calculates residuals • Find sub-sample (number of time bins in plane) of clusters with minimal chi^2 distance to the weighted mean (track + tracklet) • Simple sort used – N problem • } Projection
Clusters: Error Parameterizationwithin the Tracklet • Fluctuation of cluster’s position • Estimated as RMS of tracklet - cluster residuals • N - number of clusters in the tracklet • dy – cluster residual from a straight line fit • Uncertainty corresponding to collective shifts of tracklet added to all clusters • Correction for unisochronity and width of the Time Response Function • Systematic shift – multiplication factor N • Additional penalty factor for mean number of clusters per layer and number of pad-rows changes
Performance: Transverse Momentum Resolution • Low density environment • ITS +TPC – without TRD detector • Old TRD tracking – error parameterization based only on cluster shape • New TRD tracking – cluster error parameterization with angular dependence (without unisochronity correction) • New TRD tracking (cor) – chamber calibrated (with unisochronitiy correction) • High density environment (dNch/dy~5000) • ITS +TPC – without TRD detector • New TRD tracking with unisochronity correction
Conclusion • TRD detector was originally developed for electron identification • It is also very useful for reconstruction: • Excellent space resolution for high momentum track (small incident angle) significant improvement in the momentum resolution • Works in high density environment • The most significant improvement is due to the correct error parameterization