Download
1 / 1
10 likes | 123 Views
Object association in the TBM framework, application to vehicle driving aid D. Mercier, E. Lefèvre, D. Jolly Univ. Lille Nord de France, F-59000 Lille, France UArtois, LGI2A, F-62400 Béthune, France. Association problem description. Input:.

E N D
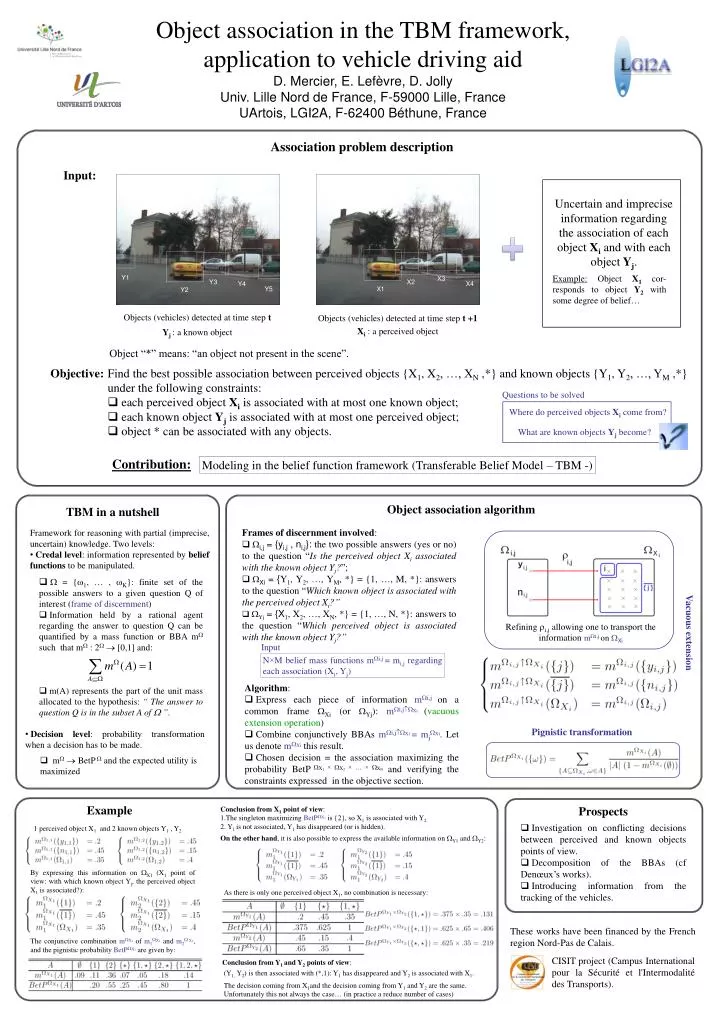
Object association in the TBM framework, application to vehicle driving aid D. Mercier, E. Lefèvre, D. Jolly Univ. Lille Nord de France, F-59000 Lille, France UArtois, LGI2A, F-62400 Béthune, France Association problem description Input: Uncertain and imprecise information regarding the association of each object Xiand with each object Yj. Example: Object X1 cor-responds to object Y2 with some degree of belief… Y1 X3 Y3 X2 Y4 X4 Y5 X1 Y2 Objects (vehicles) detected at time step t Objects (vehicles) detected at time step t +1 Xi: a perceived object Yj : a known object Object “*” means: “an object not present in the scene”. Objective: • Find the best possible association between perceived objects {X1, X2, …, XN ,*} and known objects {Y1, Y2, …, YM ,*} under the following constraints: • each perceived object Xiis associated with at most one known object; • each known object Yjis associated with at most one perceived object; • object * can be associated with any objects. Questions to be solved Where do perceived objects Xi come from? What are known objects Yj become? Contribution: Modeling in the belief function framework (Transferable Belief Model – TBM -) Object association algorithm TBM in a nutshell • Frames of discernment involved: • i,j = {yi,j , ni,j}: the two possible answers (yes or no) to the question “Is the perceived object Xi associated with the known object Yj?”; • Xi = {Y1, Y2, …, YM, *} = {1, …, M, *}: answers to the question “Which known object is associated with the perceived object Xi?” • Yj= {X1, X2, …, XN, *} = {1, …, N, *}: answers to the question “Which perceived object is associated with the known object Yj?” • Framework for reasoning with partial (imprecise, uncertain) knowledge. Two levels: • Credal level: information represented by belief functions to be manipulated. Vacuous extension • = {1, … , K}: finite set of the possible answers to a given question Q of interest (frame of discernment) • Information held by a rational agent regarding the answer to question Q can be quantified by a mass function or BBA m such that m : 2 [0,1] and: • m(A) represents the part of the unit mass allocated to the hypothesis: “ The answer to question Q is in the subset A of ”. Refining i,j allowing one to transport the information mi,j on Xi Input N×M belief mass functions mi,j = mi,j regarding each association (Xi, Yj) Pignistic transformation • Algorithm: • Express each piece of information mi,j on a common frame Xi (or Yj): mi,jXi(vacuous extension operation) • Combine conjunctively BBAs mi,jXi= mjXi. Let us denote mXi this result. • Chosen decision = the association maximizing the probability BetP X1 × X2 × … × XN and verifying the constraints expressed in the objective section. • Decision level: probability transformation when a decision has to be made. • m BetP and the expected utility is maximized Example Conclusion from X1 point of view: 1.The singleton maximizing BetPX1 is {2}, so X1 is associated with Y2. 2. Y1 is not associated, Y1 has disappeared (or is hidden). On the other hand, it is also possible to express the available information on Y1 and Y2: Prospects • Investigation on conflicting decisions between perceived and known objects points of view. • Decomposition of the BBAs (cf Denœux’s works). • Introducing information from the tracking of the vehicles. 1 perceived object X1 and 2 known objects Y1 , Y2 By expressing this information on X1 (X1 point of view: with which known object Yj, the perceived object X1 is associated?): As there is only one perceived object X1, no combination is necessary: These works have been financed by the French region Nord-Pas de Calais. The conjunctive combination mX1 of m1X1 and m2 X1, and the pignistic probability BetPX1 are given by: Conclusion from Y1 and Y2 points of view: CISIT project (Campus International pour la Sécurité et l'Intermodalité des Transports). (Y1, Y2) is then associated with (*,1): Y1 has disappeared and Y2 is associated with X1. The decision coming from X1and the decision coming from Y1 and Y2 are the same. Unfortunately this not always the case… (in practice a reduce number of cases)