Download
1 / 17
180 likes | 247 Views
Carnegie Mellon project aims to create robots that understand and collaborate with each other and humans in treasure hunt scenarios. Language-based interface integration and multi-modal interaction highlight the innovative approach. Ongoing challenges and future plans focus on enhancing robot infrastructure, team formations, and human interaction capabilities.

E N D
Human-Robot “Pickup” Teams with Language-Based Interaction Manuela Veloso, Anthony Stentz, Alexander Rudnicky Brett Browning, M. Bernardine Dias Faculty Thomas Harris, Brenna Argall, Gil Jones Satanjeev Banerjee Students Sponsored by The Boeing Company
Project Goals • Robots that discover and understand each other’s capabilities • Robots that can team together and coordinate their activities • Human-robot teams that collaborate to accomplish tasks Carnegie Mellon School of Computer Science
Domain: Treasure Hunt Human-robot teams competing to locate “treasure” in an unknown environment Team 3, report your location Carnegie Mellon School of Computer Science
Treasure Hunt scenarios • One human and two robots search for a treasure and return it to base • [Y1] stationary human; Pioneer/Segway close-coupled team • Semi-mobile human (partially accessible zones) [Y2] • Human and two teams search for treasure(s) [Y2-3] • Two teams of human/robots compete to locate and retrieve treasure(s) [Y4] Carnegie Mellon School of Computer Science
Language Interface Integration • MAP GUI integrated • Graphical display of information from robots • Mixed speech / gesture inputs • Flexible architecture • Dynamic incorporation of additional robots • Improved communications protocols • Language and Dialog • Navigation and search language • Clarification and confirmation keyed to robot capability Carnegie Mellon School of Computer Science
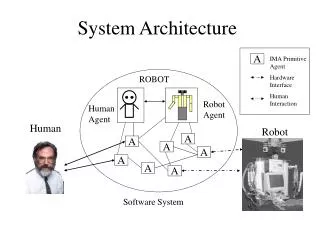
Architecture Sphinx Phoenix Raven Claw 1 Robot 1 OpTrader Helios Tablet Backend Client Helios Map Server Robot 2 Kalliope Rosetta Raven Claw 2 User interface Dialog control Robot system Speech GUI BoingLib Olympus Carnegie Mellon School of Computer Science
Multi-modal interface • Some classes of information are communicated more effectively by gesture than by language • User can specify a search path using stylus, ask robots to identify themselves • Components • Java GUI • TeamTalk dialog system • Fujitsu Stylistic 5500 tablet PC Carnegie Mellon School of Computer Science
Video of Human-Robot interaction Carnegie Mellon School of Computer Science
Near term goals • Dynamic updating of map information • Access to robot capability data • Goal conflict resolution (play / direct command) • Better Op Trader state transparency Carnegie Mellon School of Computer Science
Publications • T. K. Harris, S. Banerjee, and A. I. Rudnicky. Heterogeneous Multi-Robot Dialogues for Search Tasks. (2005) AAAI Spring Symposium: Dialogical Robots, Palo Alto, California. • T. K. Harris, S. Banerjee, A. Rudnicky, J. Sison, Kerry B., and A. Black. A Research Platform for Multi-Agent Dialogue Dynamics. (2004) Proceedings of The IEEE International Workshop on Robotics and Human Interactive Communications, Kurashiki, Japan. Carnegie Mellon School of Computer Science
Demonstration Videos • Robot Coordination • Video • Human-Robot multi-modal interaction • Video Carnegie Mellon School of Computer Science
Ongoing challenges • Search in cluttered environments • Learn to dynamically select of tactics, integrating information from team members (human, robot) and knowledge of environment • Extend play coordination to include complete state machines with additional synchronization primitives and human input • Develop multiple model-based object and teammate tracking • Extend grounding interactions between human and robot • Improve robot infrastructure; system operations made fully routine. Carnegie Mellon School of Computer Science
Y2 Plan • Develop techniques to enable robots to form pickup teams with dynamic sub-team formation and execute coordinated actions • Formalize requirements for robot team participation • Incorporate a new (Boeing) robot into the team • Explore different human-robot team compositions (team size, robot types) Carnegie Mellon School of Computer Science
Y2 Plan • Extend language and agent interfaces to allow humans to interact efficiently with pickup robot teams • Incorporate visual feedback from robots • Access richer robot state information • Extend domain ontology • Extend capability for clarification sub-dialogs • Introduce simple landmark grounding capability Carnegie Mellon School of Computer Science
Y2 Plan • Investigate extensions to the Y1 scenario • Size and complexity of the environment • Dynamic environments • Identify a final Y2 demo scenario Carnegie Mellon School of Computer Science
Technology Transfer to Boeing • TeamTalk spoken language interface • Includes Sphinx recognition system, Phoenix semantic parser, RavenClaw dialogue manager, Rosetta language generator; Boeing has synthesizer (Theta) • Updates provided over time • Working with Boeing to adapt system Carnegie Mellon School of Computer Science
Questions? Carnegie Mellon School of Computer Science