Download
1 / 21
210 likes | 403 Views
Accelerating Pathology Image Data Cross-Comparison on CPU-GPU Hybrid Systems. Kaibo Wang 1 , Yin Huai 1 , Rubao Lee 1 , Fusheng Wang 2,3 , Xiaodong Zhang 1 , Joel H. Saltz 2,3 1 Department of Computer Science and Engineering, The Ohio State University

E N D
Accelerating Pathology Image Data Cross-Comparison onCPU-GPU Hybrid Systems Kaibo Wang1, Yin Huai1, Rubao Lee 1, Fusheng Wang2,3, Xiaodong Zhang1, Joel H. Saltz 2,3 1 Department of Computer Science and Engineering, The Ohio State University 2 Center for Comprehensive Informatics, Emory University 3 Department of Biomedical Informatics, Emory University
Background: Digital Pathology • Digital pathology imaging has become an increasingly important field in the past decade • Examination of high-resolution tissue images enables more effective prediction, diagnosis, and therapy of diseases Whole slide images Scanning Image analysis Glass slides
Background: Image Algorithm Evaluation • High-quality image analysis algorithms are essential to support biomedical research and diagnosis • Validate algorithms with human annotations • Compare and consolidate multiple algorithm results • Sensitivity study of algorithm parameters Green: algorithm one Red: algorithm two
Problem: Spatial Cross-Comparison • Spatial cross-comparison: identify and compare derived spatial objects belonging to different observations or analyses • Jaccard similarity: the overlap ratio of intersecting polygons from two result sets p q
Both Data- and Compute-Intensive • Increasingly large data sets • 105x105 pixels per image • 1 million objects per image • Hundreds to thousands of images per study • Big data demanding high throughput • High computation intensity • Computing Jaccard similarity requires heavy-duty geometric operations • Demanding high performance Parallel computing techniques must be utilized to handle such intensive workloads
Existing Approach: Spatial DBMS • Extension of RDBMS with spatial data types and operators (PostGIS, DB2, etc.) • A typical cross-comparison takes many hours to finish on a single machine • 90+% computing time spent on computing the areas of polygon intersections and unions • Algorithms used by SDBMS are highly branch-intensive and difficult to parallelize • Task-based (MIMD) parallel computing can be applied on large-scale clusters • Expensive in facility of many high end nodes A high-performance/throughput and cost-effective solution is highly desirable
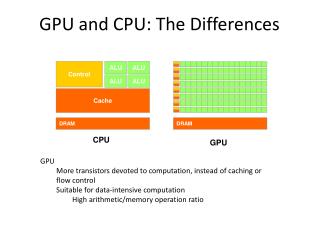
Graphics Processing Units (GPU) • SIMD data parallel architecture • Low-cost and powerful data-parallel devices GTX 580 Applications must exploit SIMD data parallelism in order to best utilize the power of GPUs GTX 480 GTX 285 GTX 280 All cores on a streaming multiprocessor (SM) execute the same instruction on different data 8800 GTX 9800 GTX 7900 GTX E.g., NVIDIA GTX 580 has 512 cores (16 SMs, 32 cores each) 980 XE X7460 Q9650 E6850 E4300 USENIX ATC’11
Our Solution: SCCG • Spatial Cross-comparison on CPUs and GPUs • Utilize GPUs with CPUs for both high throughput and high performance in a cost-effective way • Critical challenges • SIMD data-parallel algorithms on GPU • CPU-GPU hybrid computing framework • Load balancing between CPU and GPU
Outline • Introduction • SCCG • PixelBox GPU algorithm • Cross-comparing framework • Load balancing • Experiments • Conclusions
The PixelBoxGPU Algorithm • Given an array of polygon pairs, compute the area of intersection and area of union for each polygon pair • Algorithm principles • Exploit SIMD data parallelism Compute areas of polygon intersections and unions in an SIMD data parallelism mode • Maximize data parallelism and minimize unnecessary compute intensity Reduce compute intensity while maintainhigh data parallelism
Exploit SIMD Data Parallelism • Monte-Carlo approach (a basic method) Compute areas of intersection/union by counting the number of pixels lying within each region Perfect data parallelism, but high compute intensity when polygons are large p p p q q q Intersection Union Union Union Consider polygons lying on a pixel map
Reduce Unnecessary Compute Intensity • Use sampling boxes • Compute areas box by box, thus avoiding lots of costly per-pixel testing • Recursively explore unsettled boxes by partitioning them into smaller sub-boxes • Partition the bounding rectangular of a polygon pair into boxes (like grid cells) p p q q According to our testing, 50+% of areas can be determined with only one level of box partitioning p q Unsettled, thus need further exploration Completely within the intersection of p and q Completely within the union of p and q Don’t belong to either intersection or union Further partitioned
The PixelBox Algorithm • PixelBox works on both pixels and boxes In this way, PixelBox preserves the benefits of both high data parallelism and low compute intensity p p p q q q Then, pixel by pixel within small sub-boxes that need further testing First, box by box to quickly finish the testing of large regions
Implementation for GPU • All threads keep popping boxes from the stack for processing • Computation finishes when the stack becomes empty • New sub-boxes are pushed to the top of stack again • The stack top is fetched by all threads, and partitioned if it needs further testing • Use a shared stack to store the boxes to be tested Using a stack improves data parallelism: both popping and pushing can be done in SIMD fashion 1 0 0 0 0 0 1 0 1 0 0 0 0 0 0 …… 0 Thread 0 Thread 1 Thread 2 Thread 3 0 1 Contribution of each sub-box is computed; also see whether further testing is needed A box with mark 0 needs no further testing, thus ignored by all threads Partitioned into sub-boxes, then tested by different threads in parallel A box with mark 1 needs to be further partitioned, or apply Monte Carlo if it has been small enough Mark: 1 – need further testing 0 – no further testing stack Sampling box The bounding rectangular of two polygons is pushed on the stack as the first box
The Cross-Comparing Framework • A pipelined framework that executes the whole cross-comparing workflow • Pipelined execution reduces resource contention over GPUs • GPU is an exclusive, non-preemptive device • Multiple threads trying to access a GPU simultaneously are serialized • A single initiator (Aggregator) reduces blocking over GPUs Load data from disk Find intersecting polygon pairs from the data Compute Jaccard similarity GPU (PixelBox) CPU CPU
CPU-GPU Load Balancing • Both CPUs and GPUs have to be fully utilized in order to maximize throughput Load data from disk Find intersecting polygon pairs from the data Compute Jaccard similarity Consume polygon pairs on GPUs Produce polygon pairs on CPUs Tasks have to be dynamically migrated among CPUs and GPUs to achieve load balancing (please read paper for details) CPUs idle if production speed > consumption speed GPUs idle if production speed < consumption speed
Experiments • Methodology • Spatial DBMS: PostgresQL 9.1.3 + PostGIS 1.5.3 • Disk loading time not considered • “First-load-then-query” scheme of database is known to be inefficient to process one-time data • Storage devices are improving (e.g., SSD) • Ignore data format conversion and data partitioning time in SDBMS • Platforms • Dell T1500 workstation • One Intel Core i7 860 CPU (4 cores) • One NVIDIA GTX 580 GPU • Amazon EC2 instance • Two Intel Xeon X5570 CPUs (8 cores, 16 threads) • Data sets • 18 pairs of polygon sets extracted from 18 real-world brain tumor pathology images • 12GiB in raw text format Both simplifications favor the performance of PostGIS
Effectiveness of PixelBox on GPU • Algorithm performance This experiment shows the effectiveness of PixelBox and its best utilization of SIMD data parallelism of GPUs On Dell T1500, compute the Jaccard similarity of 619609 pairs of polygons in a representative data set CPU-version PixelBox on a single core Over 430 s Over 290 s Only 3.6 s 1.5 x 120 x PixelBox on GPU GEOS on a single core
Overall Performance • Cross-comparing performance Two Intel Xeon X5570 : $ 2000 Two Intel Xeon X5570 : 190 w Our solution is 2.4x lower in hardware cost, and 10x higher in performance per watt Core i7 860 + GTX 580 : $ 800 Core i7 860 + GTX 580 : 339 w 18x speedup on average Parallelized PostGIS on EC2 Our solution on Dell T1500
Conclusions • Spatial cross-comparison is a data- and compute-intensive operation • Existing approach with SDBMS is not high-performance and low-cost • We provide a software solution based on GPUs and CPUs to significantly accelerate the work at low cost
Thank You • Q & A