Download
1 / 7
70 likes | 176 Views
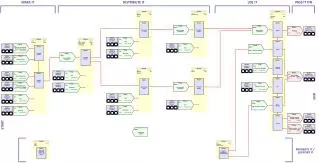
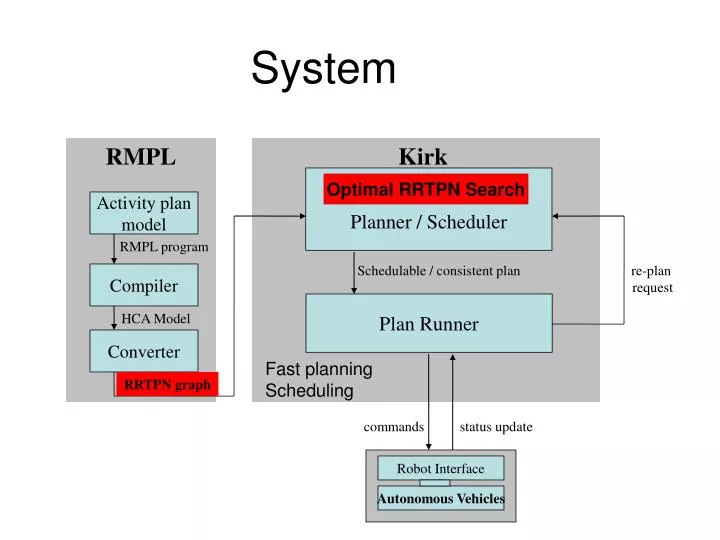
System. RMPL. Kirk. Planner / Scheduler. Optimal RRTPN Search. Activity plan model. RMPL program. Schedulable / consistent plan. re-plan request. Compiler. Plan Runner. HCA Model. Converter. Fast planning Scheduling. RRTPN graph. commands. status update. Robot Interface.

E N D
System RMPL Kirk Planner / Scheduler Optimal RRTPN Search Activity plan model RMPL program Schedulable / consistent plan re-plan request Compiler Plan Runner HCA Model Converter Fast planning Scheduling RRTPN graph commands status update Robot Interface Autonomous Vehicles
RRT (start) (goal) RRTPN • Locations in RMPL/TPN can grow RRTs in effort to satisfy the location constraints Minimum and Maximum time to get to Location C. That is, it takes at least 95 units of time to get to location C and at most 105 units of time to get to location C Signal that Robot cannot be going to any other location during this time interval [95,105] Tell(Robot.location = C) total time = 100 Tell(Not(Robot.location = C)) [95,105] If…Path Found -Return total time to travel from start to goal -Return cost of path If…No Path Found -Add a Tell( NOT( Blimp = location)) constraint -Or if total time exceeds bound RRTTPN planning model Location constraints Memory-bounded optimal plan search
RRTPN Tell(ANW1.location = daycare) [L,U] Activity: ANW1.Apply_Controls( control inputs ) [l,u] RRTTPN planning model Location constraints Memory-bounded optimal plan search
Location Constraints 1. Make a robot go to a location RMPL (sequence ((ANW1.location = daycare) [10,20]) ) RRTPN [10,20] Tell(ANW1.location = daycare) 2. Simultaneously execute on-board activities and navigate RRTPN Take_Pictures( )[5,15] RMPL (parallel ((ANW1.location = corridor) [10,20]) (( ANW1.Take_Pictures()) ) [0,0] [0,0] AND-end AND-start [10,20] [0,0] [0,0] Tell(ANW1.location = corridor) RRTTPN planning model Location constraints Memory-bounded optimal plan search
Location Constraints 3. To perform an activitiy require a robot to be at a location • RMPL • (if -thennext(ANW-1.location = lab) • ((Lower_Chembots()) [15,30]) • ) RRTPN Lower_Chembots( ) [15,30] [0,0] Ask(ANW1.location = lab) 4. Choose which location the robot should visit [10,20] RMPL (choose ((ANW-1.location = daycare) [10,20]) ((ANW-1.location = cafeteria) [15,28]) ((ANW-1.location = lab) [5,20]) ) RRTPN Tell(ANW1.location = daycare) [15,28] Tell(ANW1.location = cafeteria) Decision (OR) node [5,20] Tell(ANW1.location = lab) RRTTPN planning model Location constraints Memory-bounded optimal plan search
Strategy Selection RMPL Mission Strategies Global Path Planning Robot Models Kinodynamic Maneuver Planning
Search Building steps • Enter building through windowI or windowII • Fly to labA • Deploy chem bots