Download
1 / 16
170 likes | 510 Views
Introduction. We have focused on single-input, single-output (SISO) control problemsMost real control problems involve multiple inputs and multiple outputs (MIMO)Each input usually affects multiple outputsCan be difficult to design and tune control systemMultiloop control strategyPair input and

E N D
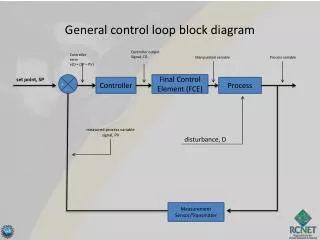
1. Control Loop Interactions Introduction
Multivariable systems
Controller interactions
Multivariable closed-loop stability
Simulink example
2. Introduction We have focused on single-input, single-output (SISO) control problems
Most real control problems involve multiple inputs and multiple outputs (MIMO)
Each input usually affects multiple outputs
Can be difficult to design and tune control system
Multiloop control strategy
Pair input and output variables together
Design SISO controller for each input/output pair
Attempt to minimize interactions between controllers
3. Multivariable Systems Blending system
wA and wB affect both w and x
Not clear how to pair variables
Distillation column
Pair R/xD and S/xB
Significant interactions between controllers
Flash drum
Pair G/P and L/h
Main interactions will be G on h
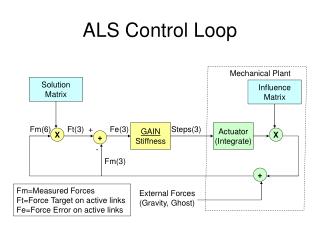
4. Stirred Tank Heating Example Control problem
Manipulated inputs: wh and wc
Controlled outputs: T and h
Mass and energy balances
Simplify energy balance using product rule
5. Stirred Tank Heating Example cont. Take Laplace transform and simplify
Transfer function matrix representation
6. Transfer Function Matrices 2x2 systems
nxn systems
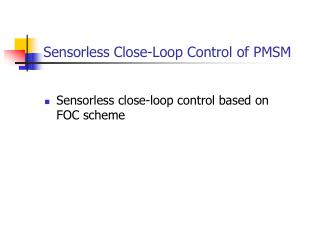
7. Multiloop Control Schemes for 2x2 Systems
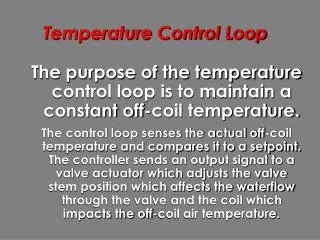
8. Controller Interactions Suppose a disturbance causes Y1 to deviate from its setpoint Ysp1
Gc1 will respond to non-zero error E1 by changing U1 to drive Y1 to Ysp1
Change in U1 will also cause Y2 to deviate from its setpoint Ysp2
Gc2 will respond to non-zero error E2 by changing U2 to drive Y2 to Ysp2
Change in U2 will also cause Y1 to deviate from its setpoint Ysp1
9. Controller Interaction Analysis Second controller in manual (Gc2 = 0)
This is the transfer function used to design Gc1
Second controller in automatic (Gc2 non-zero)
This is not the transfer function used to design Gc1
The effective transfer function depends on Gc2
Cannot tune the two controllers independently
10. Controller Interaction Example Distillation column model
SISO controller tuning
R/xD: Kc = 0.604, tI = 16.3
S/xB: Kc = -0.127, tI = 14.46
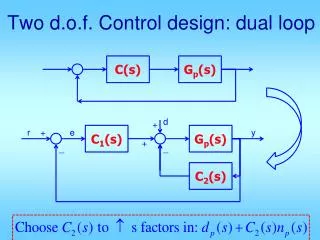
11. Multivariable Closed-Loop Stability Closed-loop relations for 1-1/2-2 control scheme
Closed-loop characteristic equation
Stability depends on both controllers in a complex way
If Gp12 = 0 or Gp21 = 0 then stability depends only on the stability of the two individual control loops
12. Closed-Loop Stability Example Transfer function model
Proportional controllers
Characteristic equation for 1-1/2-2 scheme
13. Simulink Example Transfer function model
1/1-2/2 IMC controller design (tc = 5)
14. Simulink Model
15. SISO Control Systems
16. MIMO Control System