Download
1 / 8
80 likes | 224 Views
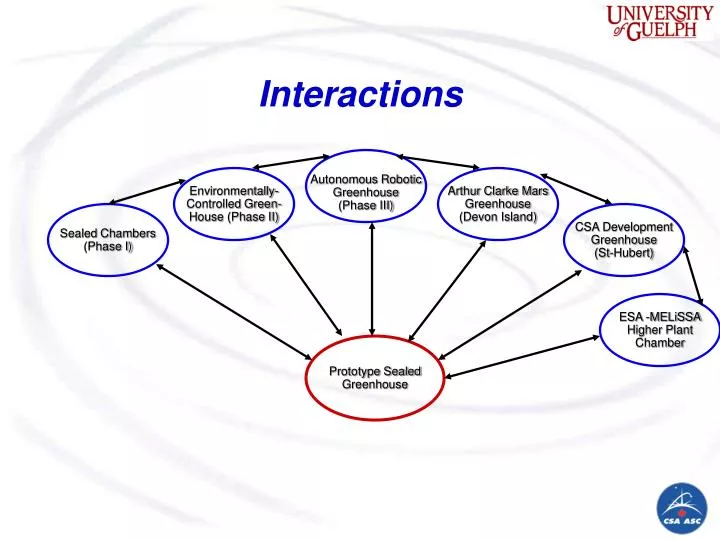
Interactions. Autonomous Robotic Greenhouse (Phase III). Environmentally- Controlled Green- House (Phase II). Arthur Clarke Mars Greenhouse (Devon Island). Sealed Chambers (Phase I). CSA Development Greenhouse (St-Hubert). ESA -MELiSSA Higher Plant Chamber. Prototype Sealed

E N D
Interactions Autonomous Robotic Greenhouse (Phase III) Environmentally- Controlled Green- House (Phase II) Arthur Clarke Mars Greenhouse (Devon Island) Sealed Chambers (Phase I) CSA Development Greenhouse (St-Hubert) ESA -MELiSSA Higher Plant Chamber Prototype Sealed Greenhouse
Technical Objectives • Containment • Integrated control • Autonomy • Reclamation/Recycling • Robustness/Reliability • Communications technology • Technology developments are designed to facilitate the scientific objectives of the entire project
Infrastructure Requirements • Sealed chambers within the autonomous robotic greenhouse • Requires additional custom engineering • Remote, sealed greenhouse at CSA • Continued Devon Island Greenhouse infrastructure upgrades (fuel cells, wind/solar generation, control systems)
Industry collaborations • Potential collaborations with: • National Instruments (data acquisition and instrument control) • Argus (environmental control) • Conviron, Angstrom Engineering
Institutional Collaborations • Current collaborations exist between: • University of Guelph • Simon Fraser University • Mars Institute • Canadian Space Agency • ESA/UAB (Spain) • University of Florida • NASA
Leveraging InvestmentsJan 2004 until now • $50k in cumulative investment in CESRF • $50k from OCE in Arctic greenhouse • $350k from CSA in Arctic greenhouse and CSA greenhouse
Leveraging InvestmentsNow until 2009 • $1M via ESA-MELiSSA work • $500k via CSA for Arctic greenhouse, CSA greenhouse, and sealed greenhouse at CSA
HQP • At least 6 graduates from Guelph • CSA will continue to support salary for at least 1 PDF, two full-time graduate students, continuous undergraduate students, and the Principle Investigator