Download
1 / 10
120 likes | 360 Views
Kinematika robotů. kinematika popisuje pohyblivost a tudíž i manipulační možnosti robota, předurčuje jeho konstrukci. počet stupňů volnosti robota. = počet os, podle kterých se hlavice robota může pohybovat. počet stupňů volnosti robota se často shoduje s počtem pohonů.

E N D
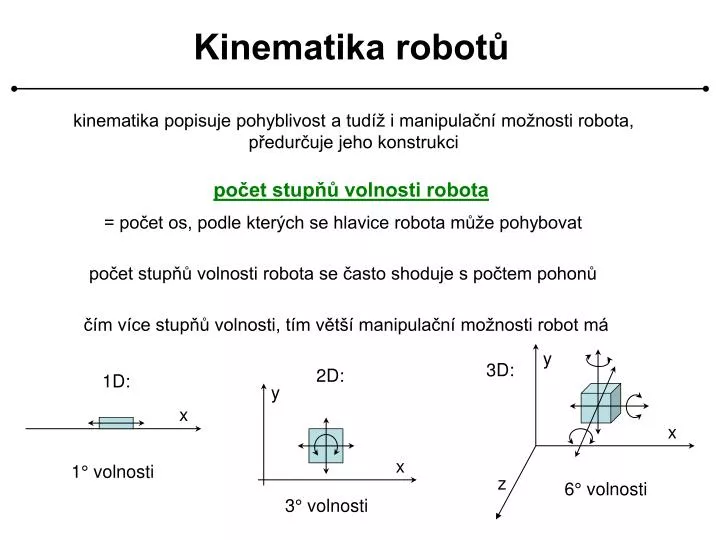
Kinematika robotů kinematika popisuje pohyblivost a tudíž i manipulační možnosti robota, předurčuje jeho konstrukci počet stupňů volnosti robota = počet os, podle kterých se hlavice robota může pohybovat počet stupňů volnosti robota se často shoduje s počtem pohonů čím více stupňů volnosti, tím větší manipulační možnosti robot má y 3D: 2D: 1D: y x x x 1° volnosti z 6° volnosti 3° volnosti
pokud má robot volně manipulovat s tělesem, musí mít v daném prostoru tolik stupňů volnosti, jako těleso pokud má robot více stupňů volnosti, než je v daném prostoru nutné, je tzv. redundantní (tzn. má nadbytečné stupně volnosti, nadbytečné pohony) př.: lidská ruka: • redundantnost vede k větší pohyblivosti
Základní kinematické dvojice kinematická dvojice = dvě tělesa, pohyblivě spojená a) translační (posuvné) dvojice • suportové uložení • smykadlové uložení • teleskopické uložení
b) rotační dvojice • otočné uložení • kyvné uložení
Druhy robotů podle kinematiky podle uspořádání prvních několika kinematických dvojic robotů můžeme rozlišovat: • TTT = tři translační (posuvné) dvojice – pracovní prostor má tvar krychle • RTT = 1x rotační, 2x translační dvojice – pracovní prostor tvaru válce • RRT = 2x rotační, 1x translační dvojice – pracovní prostor tvaru koule • RRR = tři rotační dvojice – pracovní prostor má tzv. torusový tvar
b) robot RTT robot Versatran
c) robot RRT nebo: robot Scara robot Unimate