Download
1 / 45
470 likes | 618 Views
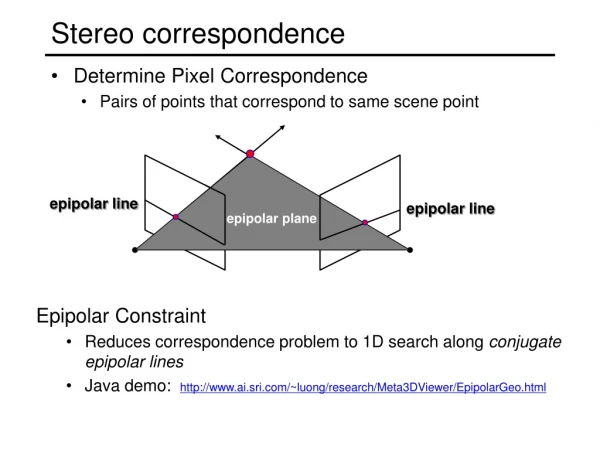
Window-based Approach For Fast Stereo Correspondence. Raj Kumar Gupta, Siu-Yeung Cho IET Computer Vision, 2013. Outline. Introduction Related Work Proposed Method Experimental Results Conclusion. Introduction.

E N D
Window-based Approach For Fast Stereo Correspondence Raj Kumar Gupta, Siu-Yeung Cho IET Computer Vision, 2013
Outline • Introduction • Related Work • ProposedMethod • ExperimentalResults • Conclusion
Introduction • Using two correlation windows to improve the performance of the algorithm • 3*3 and 9*9 • Real-time suitability • more than 10 frame/s on CPU in case of 320 × 240-sized image pair with disparity value 16
Related Work • Local methods are usually base on correlation. • Area-based (NCC, SAD, SSD) • Feature-based: rely on feature extraction and match local cues (BF, GF) • Bigger window size, more information, more blurred.
Outline • Introduction • Related Work • ProposedMethod • ExperimentalResults • Conclusion
Initial Matching • Matching cost computation: SAD d Right Left
Problem in disparity selection a. Determine disparity easily for unique minimum value b. Ambiguous disparity in case of multiple minima c. Matching cost calculated at point (205, 230) of Tsukuba image
Initial Matching: large correlation window • Matching cost computation: SAD + penalty • Penalty term • Disparity computation
Initial Matching: small correlation window • Only those disparity values that are carried by neighbouring pixels. • Matching cost computation without penalty • N: the disparity values of the neighbouring pixels. • Avoid local minima and speed up
Unreliable pixel detection • left–right cross-checking
Disparity Interpolation • Search for pixels with reliable disparity value in its eight neighbouringpixels. • Compute similarity of unreliable pixel and its reliable neighbor.
Outline • Introduction • Related Work • ProposedMethod • ExperimentalResults • Conclusion
ExperimentalResults • Computation time of the proposed algorithm for different window sizes on Tsukuba image.(image size 384 × 288 with 16 disparity labels)
Percentage error in non-occluded (nocc), whole image (all) and near depth discontinuities (disc) for different window sizes for all four images (Tsukuba, Venus, Teddy and Cones)
ExperimentalResults • a. Without using small correlation window Ws and the disparity refinement step • b. Without using the disparity refinement step • c. Without using small correlation window Ws • d. With all four steps on Tsukuba image
ExperimentalResults • Comparison the performance of the proposed algorithm with other correlation-based algorithms.
Reference • [24] Gupta, R., Cho, S.-Y.: ‘Real-time stereo matching using adaptive binary window’ (3D Data Processing, Visualization and Transmission, 2010) • [25] Zhang, K., Lu, J., Lafruit, G., Lauwereins, R., Gool, L.V.: ‘Real-time accurate stereo with bitwise fast voting on Cuda’. Int. Conf. Computer Vision Workshops, 2009, pp. 540–547 • [26] Humenberger, M., Zinner, C., Weber, M., Kubinger, W., Vincze, M.:‘A fast stereo matching algorithm suitable for embedded real-time systems’, Comput. Vis. Image Underst., 2010, 114, (11),pp. 1180–1202 • [27] Gong, M., Yang, Y.: ‘Near real-time reliable stereo matching using programmable graphics hardware’. IEEE Conf. Computer Vision and Pattern Recognition, 2005, pp. 924–931 • [28] Richardt, C., Orr, D., Davies, I., Criminisi, A., Dodgson, N.: ‘Real-time spatiotemporal stereo matching using the dual-cross-bilateral grid’. European Conf. Computer Vision, 2010, vol. 6313, pp. 510–523 • [29] Ambrosch, K., Kubinger, W.: ‘Accurate hardware-based stereo vision’,Comput. Vis. Image Underst., 2010, 114, (11), pp. 1303–1316
Conclusion • A new correlation-based stereo-matching approach. • Large window improves at non-textured image regions • Small window improves at depth discontinuities • The CPU implementation computes at a speed of more than 10 frame/s. • Easily implemented on GPU. • The proposed method can be used in real-time applications to reconstruct the 3D structures with great accuracy at object boundaries.
Codebook based Stereo Matching for Natural User Interface Sung-il Kang and Hyunki Hong 2013 IEEE International Conference on Consumer Electronics (ICCE)
Outline • Introduction • ProposedMethod • ExperimentalResults • Conclusion
Introduction • Interactive user interface has been one of the major topics in consumer electronics. • Gesture based user interface • Interactive smart TV, Nintendo Wii, Sony PlayStation3 Move, and Microsoft Kinect. • Propose a stereo system implemented on GPGPU for real-time performance. • Employcodebooktosolveocclusion.
Proposed Method • Pre-processing • Laplace od Gaussian (LoG) filter for alleviating the lighting effects. • Cost initialization • AD+Census[6] [6] X. Mei, X. Sun, M. Zhou, H. Wang, and X. Zhang, “On building an accurate stereo matchng system on graphics hardware,” Proc. of GPUCV, pp. 467-474, 2011. http://www.camdemy.com/media/4724
Proposed Method • Cost aggregation[6] • Cross-based aggregation • Color similarity and the length constraint • Refinement[6,7] • Left-right consistency check • Iterative region voting • Sub-pixel enhancement d [7] Q. Yang, C. Engels, R. Yang, H. Stewenius, and D. Nister, “Stereo matching with color-weighted correlation, hierarchical belief propagation and occlusion handling,” IEEE Transactions on PAMI, 2009.
Proposed Method Yes Occlusion? Find codeword No Yes Codeword? Update codeword No Add a new codeword
ExperimentalResults • Device: Intel Quad 2.66GHz with Nvidia GTX460. • Stereo images are captured by a Bumblebee 3 from Point Grey Inc. • Time: 80~110ms/frame • Stereo matching is implemented on GPU. • The codebook generation and its evaluation is on CPU.
ExperimentalResults [8] K. J. Yoon and I. S. Kweon, “Adaptive support-weight approach for correspondence search,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 28, pp. 650-656, 2005. [9] C. Richardt, D Orr, I Davies, and A Criminisi, “Real-time spatiotemporal stereo matching using the dual-cross-bilateral grid,” Proc. of ECCV, 2010.
Conclusion • Propose a stereo system implemented on GPGPU for real-time performance. • Good performance at static background Only.

![Flow Separation for Fast and Robust Stereo Odometry [ICRA 2009]](https://cdn1.slideserve.com/1981384/flow-separation-for-fast-and-robust-stereo-odometry-icra-2009-dt.jpg)