Download
1 / 1
10 likes | 140 Views
A Physical Model and Control Strategy for Biped Running. Muhammad E. Abdallah, Kenneth J. Waldron Mechanical Engineering Dept. Stanford University, USA. Characterizes the mechanics of biped running with a tractable model and principles.

E N D
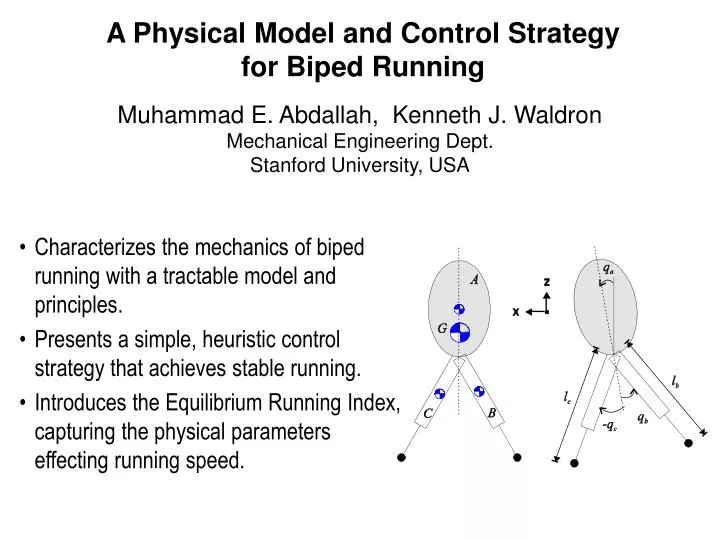
A Physical Model and Control Strategy for Biped Running Muhammad E. Abdallah, Kenneth J. WaldronMechanical Engineering Dept. Stanford University, USA • Characterizes the mechanics of biped running with a tractable model and principles. • Presents a simple, heuristic control strategy that achieves stable running. • Introduces the Equilibrium Running Index, capturing the physical parameters effecting running speed.