Download
1 / 39
430 likes | 1.03k Views
The Can Crusher . Group 12 Stanley Andrews Brandon Jefferson . Motivation . Wanted to incorporate more electrical and software design into the idea of the “Can Crusher” Use pneumatic cylinders (3 pneumatic cylinders in this project)

E N D
The Can Crusher Group 12 Stanley Andrews Brandon Jefferson
Motivation • Wanted to incorporate more electrical and software design into the idea of the “Can Crusher” • Use pneumatic cylinders (3 pneumatic cylinders in this project) • Thought it would be something different from previous senior design projects
Objectives • Step 1: Can or water bottle is placed into the trash can. Can/Water bottle enters hopper and waits for it to be identified by the optical and reflective sensor. • Step 2: Double acting cylinder pushes the object and sends it to the can crusher . • Step 3: Sorter determines route of the object based on feedback from the sensors. • Step 4: If object is a water bottle, it will be routed towards a push cylinder and crushed • Step 5: If the object is an aluminum can, it will be routed towards a push cylinder and crushed • Step 6: Push cylinder crushes the aluminum cans and water bottles and sends remains to the storage bin • Step 7: Process continues until storage sensor alerts operator that storage bin is 90% filled. • Step 8: Once storage reaches 90%. Can crusher goes into “Stop” mode. Items from storage bin, can then be removed.
Features • Fully automatic Can Crusher and Sorter • Detect when an object is placed in the hopper • Be able to distinguish between an aluminum can and a water bottle • Sort the water bottle into a separate storage bin from the aluminum cans • Detect when the storage bins are 90% full • Will havethree different modes “Standby”, “Operational (Go)”, “Stop”
Hopper Full view of the Hopper Inside the Hopper
Where the bottle and cans will be placed Be able to hold 8FL oz. water bottle and 12oz. aluminum cans Two sensors are mounted to detect the object inside the hopper Hopper
Sensors • Parallax Ultrasonic Sensor • Reflective Optical Sensor
Parallax Ultrasonic Sensor • Part a) Sensor is sending a ultrasonic pulse but object is outside of operating distance • Part b) Sensor facing object at a angle. Pulse is reflected at another angle • Part c) Sensor is facing object on level plane but object is too small. Will not reflect transmitted signal
Reflective Optical Sensor • Get the best results (peak operating distance) at 2.5 mm • One of the challenges will be to get it close enough to the object stored in the “hopper”
Terms of Service • We ask that all contents are empty • All objects must be placed horizontally in the hopper • By default system will be in “standby mode”, once an object is placed inside, the system will go into operational mode • If storage bin is full no objects will be crushed.
The idea is called the “Swinging lid” Uses a pneumatic cylinder to be able to “swing” the lid and alter the objects path Routes Aluminum Cans to proper bin Routes Water bottles to proper bin Sorter
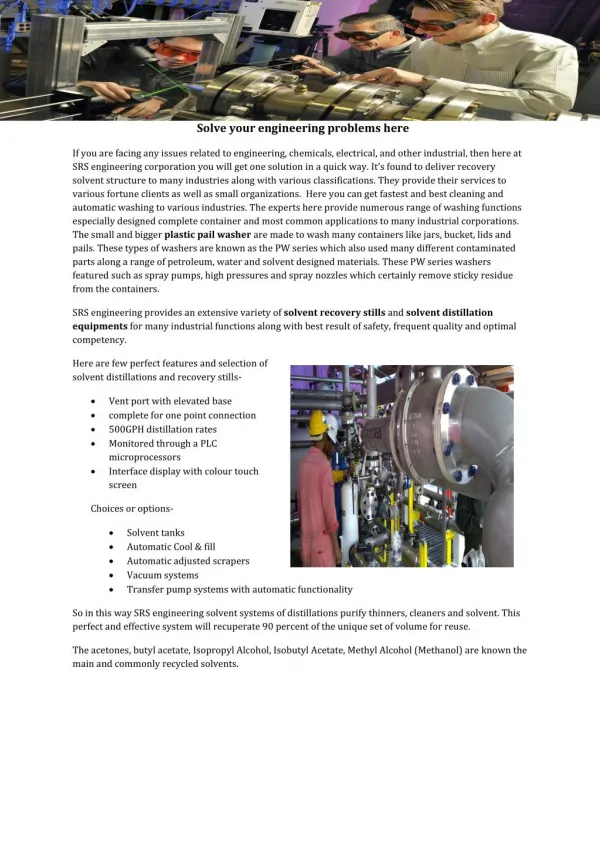
Motors/ Air Compressor Electric motors Air Compressor Pros • Uses Standard Outlet • Option to convert AC to DC • Very Compact and small to maneuver and place anywhere Cons • Most motors only have one speed • No way to speed up or slow down the project • Very Expenses for high power motors Pros • Uses a Standard Outlet • Able to adjust the air pressure • Ability to control the speed of the motor by the PSI • Option to convert AC to DC • Not to expensive economy for the budget • Can use air solenoid valves that can control of a multiple operated air pressure components Cons • Tank will have to be refilled when low on air • Will need multiple air hoses • Very big hard and to hide and maneuver • Very loud when filling up the tank
Pneumatic cylinders • Two Mini cylinder • Double Acting Cylinder (can crusher)
Cylinders Can Crusher Kick-Door Sorter
Can Crusher • Double Action Stroke Pneumatic Cylinder • Max Pressure: 1.0 Mpa • Diameter: 8.5mm (Approx.) • Thread Rod Diameter: 9mm (Approx.) • Size: 4.5 x 4.5 x 32cm • Price $38.98
Mini Cylinder • Double Action • Max Pressure: 1.0 Mpa • Diameter: 1- 1/16” • Cylinder Type: Stainless Steel • Rod Thread Length : 0.50 inches • Price: $37.50 (each)
Solenoids connected to 3 digital pins ( 8, 9, 10 Ultrasonic Sensor & TCRT5000 connected to 4 analog pins (A0, A2, A3, A4) LEDS connected to 3 digital pins (5-7) Micro Controller
Software code • Hopper (object detection) • TCRT5000 • Ultrasonic Sensor • Loop
Storage Bins • Two storage bins • Aluminum Can and Water Bottle • Each bin will have Parallax Ultrasonic sensor • Once storage reaches 90%. Can crusher goes into “Stop” mode
Enclosure Trash Can Cabinet
TCRT5000 • Software Design • Water bottles • Ultrasonic Sensor Issues Ambient light affecting the read out of the TCRT5000 Manipulating the microcontroller to distinguish between a water bottle and aluminum can Water bottles not crushing Placement of how the object falls into the hopper affected if it was detected or not