Download
1 / 20
220 likes | 332 Views
Intelligent controller design based on gain and phase margin specifications. Daniel Czarkowski and Tom O’Mahony * Advanced Control Group, Department of Electronics Engineering, Cork Institute of Technology, e -mail s : dczarkowski @cit.ie * tomahony@cit.ie. Overview.

E N D
Intelligent controller design based on gain and phase margin specifications Daniel Czarkowski and Tom O’Mahony* Advanced Control Group, Department of Electronics Engineering, Cork Institute of Technology, e-mails: dczarkowski@cit.ie * tomahony@cit.ie
Overview • Do advanced control structures significantly outperform PID for SISO systems? • Compare • PID • 2-DOF PID • GPC ISSC 2004, Belfast
Contents List • Types of controllers • Tuning • Gain and phase margin criteria • Non convex problem to be solved • Genetic Algorithms • Models used in the evaluation • Results • Conclusions ISSC 2004, Belfast
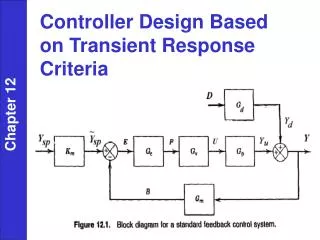
PID controller • Controller structure • Control law • 3 Variables to tune ISSC 2004, Belfast
2-DOF PID controller • Controller structure • Control law • 6 variables to tune ISSC 2004, Belfast
GPC controller • Introduced by Clarke et al., 1987 • Two degree of freedom structure • Digital controller was used • Unconstrained control algorithm • 7 tuning parameters ISSC 2004, Belfast
GPC properties • Advantages • Two degree of freedom • Optimal controller • Can handle more complex systems • More flexible structure • Disadvantages • No well developed tuning rules • More difficult to tune • Very few industrial implementations ISSC 2004, Belfast
Design strategy • Performance & robustness • Performance • IAE servo + regulator • Robustness • Gain and phase margin ISSC 2004, Belfast
Non-convex problem • Inverse unstable system Avoid local minima! ISSC 2004, Belfast
Genetic Algorithms • Stochatistic optimisation method • Gray Coding • Stochatistic Universal Sampling, SUS • Single point crossover • Maximum number of generations, 300 • Population size, 100 • Constraints on the controller parameters ISSC 2004, Belfast
Direct the GA • GA optimisation problem • Penality factors on gain and phase margins ISSC 2004, Belfast
Models • Benchmark test • Inverse unstable system • Integrating systems • Underdamped system • Conditionally stable system • 3 models with time delay • First order model • 12 models were evaluated (K. J. Åström 1998, 2000) ISSC 2004, Belfast
Results • Comparison of PID, 2-DOF PID and GPC GPC outperforms the other two counterparts ISSC 2004, Belfast
Results • Design based on minimum Am=6dB • GPC vs PID,average IAE decreased by 43% • GPC vs 2-DOF PID,average IAE decreasedby 25% • 2-DOF PID vs PID,average IAE decreased by 24% • Design based on minimum Am=14dB • GPC vs PID, average IAE decreased by 37% • GPC vs 2-DOF PID, average IAE decreasedby 22% • 2-DOF PID vs PID, average IAE decreasedby 15% ISSC 2004, Belfast
Set-point following • Model • Design • Results Better robustness achieved by PID controllers! ISSC 2004, Belfast
Set-point following • Model • Design • Results GPC performs 25% better than the PID controllers! ISSC 2004, Belfast
Set-point following • Model • Design • Results GPC does not perform better than the PID controllers! ISSC 2004, Belfast
Summary of work • A GA approach to tuning controllers based on gain and phase margin was applied • Novel optimisation function was proposed • Twelve models were tuned • Three controllers were evaluated • The controllers were subsequently employed on a real time system ISSC 2004, Belfast
Conclusions • GPC performance depends on the sampling period • Tuning strategy works well, but... • GPC performed better in simulation, but... • Do advanced control algorithms perform better? ISSC 2004, Belfast