Download
1 / 8
80 likes | 233 Views
An Application of the Boe-Bot and Its Sensors. Bailee Hurm and Jason Fogarty. Objective.

E N D
An Application of the Boe-Bot and Its Sensors Bailee Hurm and Jason Fogarty
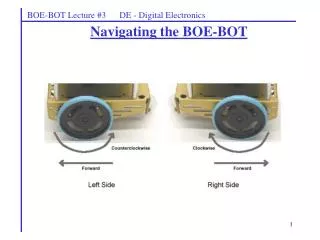
Objective The boe-bot is a complex battery powered robot that we have been working with to reach an end goal of an automatic navigation through a wooden maze, up a ramp, and once it reaches the top of the ramp, to stop.
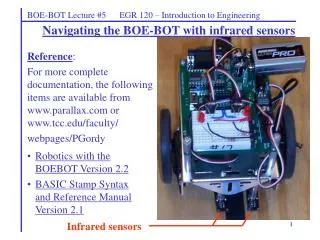
Background Sensors used: Infrared sensor: Detects distance (when a wall/object gets too close, boe-bot redirects itself) Accelerometer: Detects an incline (used for the ramp)
Equipment Used • Boe-Bot • Basic Stamp Programming • Bread Board • Laptop • Wires • 220 Ohm Resistors • 1K Ohm Resistors • Cardboard bricks • Wood • Batteries • Infrared sensors • Accelerometer
Procedure • Assembling the boe-bot. • Learning/exploring new sensors for the boe-bot. • Programming each sensor with the boe-bot. • Applying these sensors in mini challenges. • Experimenting with which sensors will be used. • Experiencing trial and error when programming the final race day program
Data The boe-bot went through the maze perfectly, got halfway up the ramp and got stuck which is where the sticky note in the middle of the ramp is shown.
Discussion Wheels were not calibrated, therefore making the boe-bot veer off into the wall Inconsistency was a result of the uncalibrated wheels Future advice: Explore more sensors which will then possibly lead you to accuracy and consistency
Conclusion We did not reach our outcome, but there was still much knowledge gained. In future projects, we need to think outside of the box and explore more possibilities which could lead to achieving the goal