Download
1 / 52
520 likes | 591 Views
Explore phase transition effects in systems through percolation theory, random graphs, and connectivity models. Discover how small changes in parameters lead to significant shifts in behavior. Gain insights into network structures and routing efficiencies.

E N D
Phase transitions an engineering perspective MASSIMO FRANCESCHETTI University of California at Berkeley
Phase transition effect when small changes in certain parameters of a system result in dramatic shifts in some globally observed behavior of the system.
Example percolation theory, Broadbent and Hammersley (1957)
P 1 0 pc p Example Broadbent and Hammersley (1957) H. Kesten (1980)
Phase transitions in random graphs Erdös and Rényi (1959) Broadbent and Hammersley (1957) Gilbert(1961) Physics Mathematics Models of the internet Impurity Conduction Ferromagnetism… Universality, Ken Wilson Nobel prize Percolation theory Random graphs Random Coverage Processes Continuum Percolation Grimmett (1989) Bollobas (1985) Hall (1985) Meester and Roy (1996)
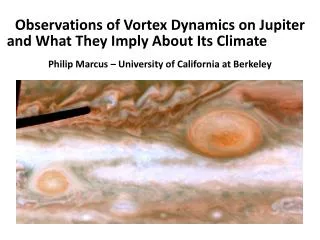
Where are the phase transitions? Large scale networks of embedded devices • Ad-Hoc networks • Sensor networks
Uniform random distribution of points of density λ One disc per point Studies the formation of an unbounded connected component First model Continuum percolation, Gilbert (1961)
B A First model Continuum percolation, Gilbert (1961) The first paper in ad hoc wireless networks !
Example l=0.4 l=0.3 lc~0.35910…[Quintanilla, Torquato, Ziff, J. Physics A, 2000]
More wireless models Unit area Penrose (1997) Penrose Pisztora (1996) Xue Kumar (2003) Density of points in Gilbert (1961) [Meester, Roy book (1996)] Haggstrom Meester (1996) Dousse Baccelli Thiran (2003) Booth, Bruck, Franceschetti, Meester (2003) Continuum Percolation Nearest neighbors percolation Percolation with interference Clustered networks
Towards a less idealistic model Franceschetti, Booth, Cook, Meester, Bruck (2003)
Prob(correct reception) Experiment
Connection probability Connection probability 1 1 d 2r d Our model Continuum percolation Connectivity model
Connection probability 1 x A first order question How does the percolation thresholdlcchange?
Squishing and Squashing Connection probability x
Theorem Forall “it is easier to reach connectivity in an unreliable network” “longer links are trading off for the unreliability of the connection”
Shifting and Squeezing Connection probability x
Connection probability 1 x Example
Do long edges help percolation? Mixture of short and long edges Edges are made all longer
Conjecture Forall
ò < < ¥ 0 g ( x ) 2 Î Â x Theorem Forall For all , there exists a finite , such that gssr*(x)percolates, for all It is possible to decrease the percolation threshold by taking a sufficiently large shift !
Squishing and squashing Shifting and squeezing What have we proven? (sporadic) long links help the percolation process CNP
Is the disc the hardest shape to percolate overall? CNP What about non-circular shapes? Among all convex shapes the hardest to percolate is centrally symmetric Jonasson (2001)
CNP Bottom line To the engineer: above 4.51 we are fine! To the theoretician: can we prove “disc is hardest” conjecture? can we exploit long links for routing?
Regular Small World Random Small World Networks Watts Strogatz (1998)
Routing in a small world each node has only local information of the network connectivity Kleinberg (2000) Franceschetti & Meester (2003) • Nodes on the grid • Fixednumber of contacts • Probabilityscales with distance • Nodes on the plane • Random number contacts in a given region • Density scales with distance
Routing in a small world Connections of z are PPP of density e-delivery occurs when msg is delivered within eto target T e S
Routing in a small world T e d S
Routing in a small world T e d S Scale the number of neighbors as 1/x2 to obtain efficient routing
Not only graphs… One application
A pursuit evasion game Sinopoli, Schenato, Franceschetti, Poolla, Sastry (2003)
Problem formulation • Goal:given observations find the best estimate (minimum variance) for the state • Butmay not arrive at each time step when traveling over a sensor network Intermittent observations
System z-1 xt+1 xt ut M yt+1 et Kalman Filter + K + - + z-1 M
Loss of observation • Discrete time LTI system • and are Gaussian random variables with zero mean and covariance matrices Q and R positive definite.
Let it have a “huge variance” when the observation does not arrive Loss of observation • Discrete time LTI system
Kalman Filter with losses • The arrival of the observation at time t is a binary random variable • Redefine the noise as: • Derive Kalman equations using a “dummy” observation when • then take the limit for gt=0
Special cases C is invertible, or A has a single unstable eigenvalue