Download
1 / 28
280 likes | 375 Views
Rocket Based Deployable Data Network. University of New Hampshire Rocket Cats Collin Huston, Brian Gray, Joe Paulo, Shane Hedlund, Sheldon McKinley, Fred Meissner , Cameron Borgal. 2012-2013 Flight Readiness Review Submission Deadline: March 18, 2013. Overview. Objective

E N D
Rocket Based Deployable Data Network University of New Hampshire Rocket Cats Collin Huston, Brian Gray, Joe Paulo, Shane Hedlund, Sheldon McKinley, Fred Meissner, Cameron Borgal 2012-2013 Flight Readiness Review Submission Deadline: March 18, 2013
Overview • Objective • Launch Vehicle Design and Dimensions • Key Design Features • Motor Selection • Mass Statement and Mass Margin • Stability Margin • Recovery Systems • Kinetic Energy • Predicted Drift • Test Plans and Procedures • Full-scale Flight Test • Recovery Testing • Summary of Requirements Verification • Payload Design • Key Design of the Payload • Payload Integration • Interfaces • Summary of Requirements Verification
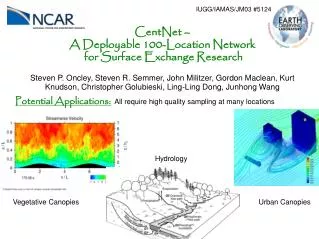
Objective • The UNH Rocket Cats aim to create a Rocket Based Deployable Data Network (RBDDN). The objective is to design a low cost data network that can be deployed rapidly over a large area utilizing rockets.
Launch Vehicle Dimensions • Vehicle Dimensions • 75.2” in length • 4” Outer Diameter • 10” Span Diameter
Key Design Features • 2+1 event recovery system to allow safe vehicle recovery with separate payload ejection • Piston based ejection system for the main parachute • Removable aluminum bulkheads to allow for full tube access • Fiberglass and Kevlar reinforced blue tube
Cesaroni Technology Inc. K740-CS Reloadable Motor • Total Length: 15.9 in (4 grain) • Diameter: 54 mm • Launch Mass: 51.8 oz. • Total Impulse: 1855 Ns • Average Thrust:747 N • Maximum Thrust: 869 N • Burn Time: 2.48 seconds • Thrust to weight ratio: 9:1 • Exit Rail Velocity : 45.17 ft/s Motor Selection
Stability Margin • Static Stability Margin • 1.81 calibers • Center of Pressure • 53.5” from the nose tip • Center of Gravity • 46.3” from the nose tip
Kinetic Energy • KE = • The kinetic energy values shown are calculated from the chosen parachutes for the rocket
Predicted Drift Vehicle Deployed Payload
Tests of the Staged Recovery System • Deployed the main and drogue parachutes. • Deployed the nose cone. • Successfully tested the main parachutes ejection charge potential of deploying • the nose cone in the event of a nose cone deployment failure Successful deployment of main parachute and nose cone by main parachute charge. Ejection charge testing set up.
Full-scale Flight Test #1 • Successful exit from rails • Successful main payload deployment • Issues with vehicle recovery systems caused total parachute failure or “lawn dart” • Failure causes determined and improved through post flight inspection
Full-scale Flight Test #2 • Mission success for all vehicle requirements • Payload flown with mass simulators • Drift well controlled in high winds
Summary of Requirements Verification (Vehicle) • Cesaroni K740: • Apogee of 5,282 feet (AGL) • Altimeters: • PICO-AA2 (primary), ADEPT DDC22 (primary backup), and PICO-AA1(nose cone) • Vehicle velocity: • 0.58 Mach • Recoverable & Reusable: • Non-degradable and reusable materials were used. • Independent Sections: • 3 sections, nose cone, booster section, and parachute bay. • Prepared for flight within 2 hours: • Full scale test launch took 1 hour and 36 minutes to fully prepare.
Summary of Requirements Verification (Continued) • Remain in launch ready state for 1 hour: • Estimates suggest 8 hours of functionality before any functionality is lost. • Rail size: • The rocket is functional with a 10 10 rail size. • 12 volt direct current firing system: • Succesfully launched full scale with a 12 volt current firing system. • No external circuitry • There is no external circuitry. • Commercially available motor: • CessaroniK740 • Total impulse less than 5,120 Ns: • 1855 Ns
Summary of Requirements Verification (Continued) • Ballast: • The ballast is less than 10% of the unballasted vehicle mass. • Successful full scale launch: • Successful launch was completed on March 17, 2013
Payload Design Overview • Primary payload • Deployed payload in nose cone • Atmospheric and GPS sensor data • Transmit and store sensor data • Secondary payload • GPS sensor data • Act as node in network, transmit, and receive relevant data Primary payload exploded diagram Primary payload in nose cone
Payload Sled Design • Fiberglass trays with aluminum threaded rods and Delrin® blocks • Machined aluminum rear bulkhead and fiberglass front bulkhead • Primary sled dimensions: 11.5” x 3.75” • Secondary sled dimensions: 7” x 3.9”
Primary Payload Components • ArduinoNano • Barometer: BMP085 • Humidity and Temperature: SHT15, Cantherm MF51-E thermistor • Ambient Light: PDV-P9200 • Ultraviolet: PC10-2-TO5 • Raspberry Pi • GlobalSat BU-353 GPS • Xbee 900 Pro
Secondary Payload Components • Raspberry Pi • GlobalSat BU-353 GPS • Xbee 900 Pro Secondary payload model render
Payload Integration • Sled containing primary payload is secured in nosecone using external bolts • Sled containing secondary payload is secured in rocket body using the same method.
Interfaces • Primary payload connects to recovery system via direct wired connection • Communication to ground station and deployed nodes via Xbee 900mHz connection • Avionics are isolated in separate bay • Testing for effects of EMI performed • 1” Launch rails
Conclusion The team has built and tested a rocket for competition in the NASA-USLI. We are excited to travel to Huntsville and show off our hard work.