Download

1 / 7
70 likes | 171 Views
Intelligent Ground Vehicle Competition. Navigation Michael Lebson - mlebson@my.fit.edu James McLane - jmclane@my.fit.edu Image Processing Hamad Al Salem - halsalem@my.fit.edu Shane Brumbley - sbrumble@my.fit.edu Faculty Sponsor Dr. Eraldo Ribeiro - eribeiro@fit.edu Project Website

E N D
Intelligent Ground Vehicle Competition Navigation Michael Lebson - mlebson@my.fit.edu James McLane - jmclane@my.fit.edu Image Processing Hamad Al Salem - halsalem@my.fit.edu Shane Brumbley - sbrumble@my.fit.edu Faculty Sponsor Dr. EraldoRibeiro - eribeiro@fit.edu Project Website http://my.fit.edu/~mlebson/seniorDesign
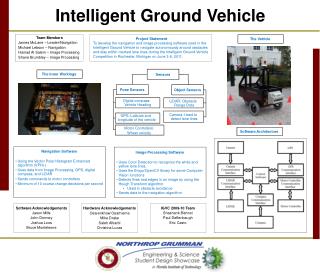
Introduction • Designing Control Software for autonomous obstacle course navigating vehicle. • Must navigate from waypoint to waypoint • Must use LIDAR, GPS, Digital Compass, and Camera to determine movement around the course • Must stay within lane lines and avoid obstacles in the completion lane
Overall Progress • Hardware • Not so good… hardware failures • Probably not ready for competition • Software Testing • Can’t test with a broken robot • Simulation alternative, difficult to simulate amount of data. • Will attempt anyway.
Navigation Progress • Critical bugs squashed • Unit conversion • cm/s != mm/s • m/s != mm/s • When turning right, keep turning right? • “Random” equation coefficients shouldn’t be random. • Think function vastly more efficient • ~5 unnecessary loops eliminated
Image Processing Progress • For line detecting, the camera works and detects every line. • Much faster than before. • Future • Integrate the VideoForm code to the main interface. • Minimizing the lines for white and yellow colors.