Download
1 / 30
300 likes | 537 Views
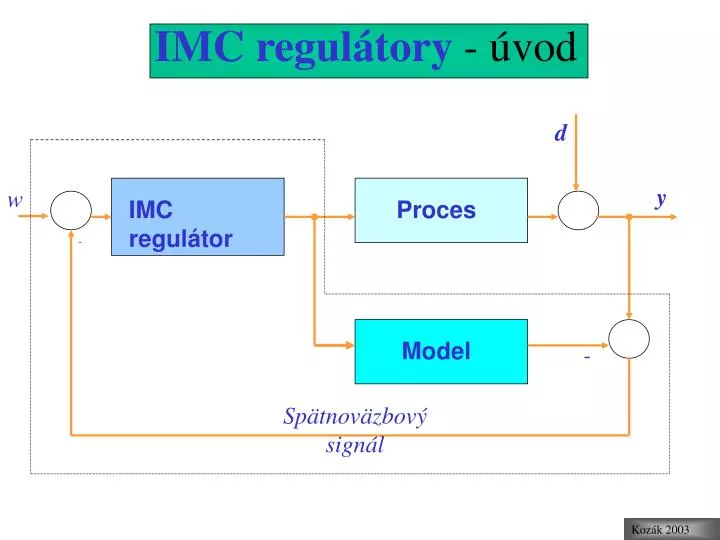
IMC regul átory - úvod. d. y. w. IMC regulátor. Proces. -. Model. -. Spätnoväzbový signál. Kozák 2003. IMC štruktúra Z á kladn é bloky: regulátor, model procesu. Vstupmi do riadiaceho systému sú referenčný signál, meraný signál procesu

E N D
IMC regulátory - úvod d y w IMC regulátor Proces - Model - Spätnoväzbový signál Kozák 2003
IMC štruktúra • Základné bloky: regulátor, model procesu. • Vstupmi do riadiaceho systému sú referenčný signál, meraný signál procesu • Výstupom je riadiaci zásah vstupujúci do procesu. • Takáto štruktúra má viacero výhod oproti klasickej štruktúre • Úlohou výstupu z paralelného modelu je odčítať účinok vplyvu akčného zásahu od výstupu procesu. • Ak, že model je ideálnou reprezentáciou procesu, potom spätnoväzbový signál je rovný len poruche. • Za predpokladu zhody modelu a procesu je systém vlastne otvorený obvod, nemá klasickú spätnoväzbovú štruktúru a preto sa v ňom nevyskytuje problém spätnoväzbovej stability.
8. Celý URO - systém je stabilný práve vtedy, keď proces a IMC regulátor sú stabilné. 9. IMC regulátor - dopredný (feedforward) regulátor. 10. IMC štruktúra nemá nevýhody doprednej regulácie, pretože dokáže potláčať vplyv porúch spätnoväzbovým signálom 11. Spätnoväzbový signál je nenulový len v prípade nenulového poruchového signálu. 12. Spätnoväzbový signál je rovný poruchovému signálu a podľa neho len predstavuje žiadanú hodnotu. 13. Ak model nevystihuje presne dynamické správania regul. procesu, potom spätnoväzbový signál vyjadruje vplyv poruchového signálu a vplyv nepresnosti modelu.
Syntéza IMC regulátora • Krok - Návrh regulátora optimálny pre sledovanie vstupu (setpoint tracking) alebo potláčanie porúch (disturbance rejection) podľa niektorého kritéria optimality s ohľadom na uvažovaný model procesu • V druhom kroku môže byť IMC regulátor doplnený IMC filtrom (znižujúcim pásmo priepustnosti regulátora) tak, aby sa zabezpečilo dosiahnutia predpísaného stupňa robustnej stability a kvality pri známom rozsahu neurčitosti procesu resp. nepresnosti modelu.
y c r u Pro ces Regulátor + e - Intern al yM - M odel Variant IMC – konvenčná štruktúra Variant IMC – NNC-NNE štruktúra
Inverzný fuzzy model Proces Fuzzy modelprocesu Variant IMC –NNC štruktúry Variant IMC – Fuzzy štruktúra
IMC štruktúry regulácie • Internal Model Control (IMC) prístupy : • Jednoduchosť • Robustnosť • Nenáročná aplikácia pre priemyselné procesy • Typy štruktúr • Konvenčná IMC štruktúra • Fuzzy IMC • Fuzzy-neuro štruktúry IMC • Výstupná regulovaná veličina v s-oblasti je : Y(s)=Gp(s)U(s)+d(s) kde dje nemerateľná porucha pôsobiaca na výstupe procesu. V normalnom režime "perfect control situation“ výstup sleduje referenčnú premennú, y=w.
d e u y W + G G IMC p + - - G pa
d e u y W + + + G G IMC p + - G pa Alternatívna IMC štruktúra + e u y W GP(s) - Ekvivalentná spätnoväzbová štruktúra
Zo zavedených vzťahov vyplývajú tieto vlastnosti IMC štruktúr: • ak model je perfektný a Gp(s)=Gpa(s) potom: • U(s)=GIMC(W(s)-d), Y(s)=Gpa(s)GIMC(s)(W(s)-d)+d • podmienky stability URO: výstup z regulátora bude ohraničený ak GIMCje stabilný, výstup bude stabilný ak súčin GpGIMCje stabilný • IMC štruktúra zabezpečuje „perfect control“ (Y(s)=W(s)) pre t, a pre dak Gp=Gpa and Gimc=inv(Gp) V praxi je potrebné uvažovať následovné skutočnosti: 1.Gpanikdy nie je rovné Gp 2. podmienka GIMC=inv(Gpa) je ťažko splniteľná, pretože prenosová funkcia môže obsahovať dopravné oneskorenia alebo nestabilné nuly v modeli procesu
Modifikácia IMC prístupu pre riešenie praktických problémov návrhu IMC regulátorov: • model procesu môže byť separovateľný na neinvertibilnú G+pa(nestabilné póly, dopravné oneskorenie) a invertibilnú časť G-pa • Gpa= G+paG-pa • IMC regulátor je potom počítaný podľa vzťahu • GIMC(s)=(1/G-pa)/F(s), • kde F(s) je prenosová funkcia filtra v tvare F(s)=(1/((s+1)ⁿ))
Ideálny prípad: Model procesu Gp(s) a d sú známe Perfect control : Y(s)=W(s)=Gp(s)U(s)+d(s) • Riadiaci zásah: U(s)=1/Gp(s)[W(s)-d]). • Realita: Porucha d je nemerateľná, Gp(s) je len čiastočne známy pomocou modelu Gpa(s) (approximácia reálneho procesu) • Nech Gpa(s) je najlepší odhad dynamiky Gp, potom najlepší odhad poruchy d je daný rozdielom výstupu a predíkcie modelu Gpa(s)U(s),dest=y-Gpa(s)U(s) • GIMC(s)=1/Gpa(s). • Riadiaci zásahU(s)=GIMC(s)[W(s)-dest] A uvažujeme, že porucha je zložená z merateľnej a nemerateľnej časti d(s)=Gd1(s)d1(s)+d2(s) potom riadiaci zásah
Príklad IMC1 Model procesu: Filter:
Zovšeobecnenie IMC stabilné
= G-pa GIMC(s)= Citlivostná funkcia Komplementárna funkcia Príklad IMC2-1: Stabilný proces Regulátor: GIMC(s)=(1/Gpa)/F(s),
Príklad IMC2 Nestabilný proces-návrh IMC GIMC(s)= GIMC(s)= Stabilné
Koeficienty a a b sú určené tak, aby mal nulu v s =2 za účelom krátenia nestabilných pólov v 2 = s . Kde výraz vyjadruje vplyv nestabilných pólov na proces Vyjadruje vplyv nestabilných núl na proces
FUZZY INTERNAL MODEL CONTROL (F-IMC) • Nadväznosť na (FuzzyInverse Control), Garcia and Morari (1982)). • IMC prístup • Model procesu • Regulátor • Model Control (IMC) zložený z troch častí : • model pre predikciu riadiaceho zásahu do procesu • návrh regulátora na báze inverzie modelu procesu • návrh filtra pre zabezpečenie robustnosti pri neurčitostiach a poruchách Fuzzy
FMBC : Model riadeného procesu je vyjadrený pomocou fuzzy množín ako vstupno-výstupný model podľa nasledovnej formulácie a použití pravidiel, ktorých je konsekventom je váhovaný výstup Ri: if y(k) is Ai1 and ... and y(k-ny+1) is Ainy and... if u(k) is Bi2 and and u(k-nu+1) is Binu then kde Ail, Bil sú fuzzy množinyaij, bij a ci sú ostré hodnoty parametrov konsekventu.
Výstupná predikovaná hodnota je potom vyjadrená jako váhovaná stredná hodnota podľa vzťahu kde i vyjadruje mieru splnenia i-tého antencedentu v pravidle
Nelineárny proces (Hammerstein typ modelu) 1. Kroková predikcia
Modelovanie dynamických procesov pomocou fuzzy množín (FM) • Typ modelu Takagi-Sugeno (lineárne aj nelineárne procesy) • Fuzzy modelovanie a identifikácia z meraných údajov (aproximácia nelineárnych neurčitých dynamických modelov • vhodnosť SISO aj MISO a MIMO (relačné modely) • Štruktúra fuzzy MIMO modelu • počet vstupov ni • počet výstupov no • celkový systém je aproximovaný súborom prepojených diskrétnych fuzzy modelov
Výstupný vektor : Regresný vektor ny a nu súpočty vektorov hodnôt maticevstupných a výstupných hodnôt v minulosti a nd je vektor histórie dopravných onneskorení Flsú pravidláare ruleTakagi-Sugenovho typu.
kde - xlije prvok regresného vektora - lije antecendent (fuzzy množina) i-tého pravidla, - li a li sú vektory koeficientov polynómov - Klje počet pravidiel l-tého modelu Fuzzy množina li je definovaná je rozmernosť antecendentu
Koeficienty MIMO Takagi±Sugeno pravidiel sú odhadované y meraných vstupno-výstupných údajov • riešenie Gustafson-Kessel clustering algorithm • TS pravidlá metóda MNŠ (najmenších štvorcov) (Matlab-Simulink prostredie automatické generovanie parametrov TS • MBPC (model based predik.control) všeobecná metodológia riešenia problémov prediktivného riadenia. • Konvenčné MBPC tri základné úlohy: • explicitné použitie modelu pre predikciu výstupu • výpočet postupnosti riadiaceho zásahu minimalizáciou účelovej funkcie • posunutie horizontu predíkcie (aplikovaný iba prvý riadiaci zásah)
Ilustrácia metód vetiev a hraníc (branch-and-bound methods) pri prediktívnom riadení