Download
1 / 21
210 likes | 335 Views
Applications of Single and Multiple UAV for Patrol and Target Search. Pinsky Simyon. Supervisor: Dr. Mark Moulin. Summary of the Presentation. Definition of UAV Patrol and Search (P&S) Problem. Simplification and Explicit Definition of UAV Patrol and Search (P&S) Problem.

E N D
Applications of Single and Multiple UAV for Patrol and Target Search. Pinsky Simyon. Supervisor: Dr. Mark Moulin
Summary of the Presentation. • Definition of UAV Patrol and Search (P&S) Problem. • Simplification and Explicit Definition of UAV Patrol and Search (P&S) Problem. • Dijkstra Shortest Path Algorithm and its application for P&S problem. • Single UAV P&S : Simulation Results. • Multi UAV P&S : Simulation Results. • Conclusions.
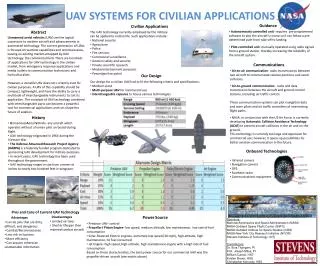
Background. • Today, UAV’s are mainly human operated. • Area research task of today - Autonomous UAV. • Area research task of tomorrow - Autonomous Team of UAVs. • Applications: Search, Patrol, Mapping, Photographing etc. • Common Problem of all the applications under autonomous mode - Optimal Path Planning under constrains: • terrain topography • hazards • fuel ,changing weather, mission updates, cooperative task etc.
Theoretical Solution Methods. • P&S automation problem is extremely complex. • Numerous approaches to the problem definition and solution has been investigated in resent years. • We have examined the applicability of 3 methods: • Swarms Methodology : each individual UAV has little intelligence which contributes to the group intelligence. It is interesting to investigate the behavior of the group varying the intelligence of the individual UAV. The main problem is a lack of mathematical approach. • Q-learning – Very Large State Space. • Dijkstra shortest path- is the applied method in this project.
Simplification of the original problem and its explicit definition. • Simplified Problem: A Patrol & target search under terrain constrains The Map is discrete, and includes regions containing • Hazards. • Preferred destinations. • The target. • Solution: Find the Optimum Path between the bases. • Applicability of the solution: Patrol can be performed by single or multiple UAV. Nowadays performed by human operators on the US and Mexico Border by Hermes.
Discrete Model of Terrain. G(N,A)- finite nonempty set of N nodes and collection A of arcs. - sequence of nodes. - each pair is an arc of G. -the weight of the arc represents the distance between the two nodes. On the plotted map one can see: Home Bases, Hazards, Preferential Areas and a Target.
Optimization Problem formulation. Given two nodes S and T (which represent the two bases) in a graph G=(N,A) , we need to find the path P such that it minimizes the sum of the weights associated with the edges constituting the path. Let , where and and ( denotes the neighboring nodes of ) Hence we need to find: When is the weight between the two nodes. • Available Algorithms: Dijkstra, Floyd's(O(v^3)), Bellman-Ford(negative),…
Dijkstra Shortest Path Algorithm. • Solves the single-source shortest-paths problem on a weighted, directed graph G = (N, A) for the case in which all arcs weights are nonnegative. • Maintains a set S of vertices whose final shortest-path weights from the source s have already been determined. • Repeatedly selects the vertex with the minimum shortest-path estimate, adds n to S, and relaxes all edges leaving n. • DIJKSTRA(G, w, s) • INITIALIZE-SINGLE-SOURCE(G, s) • S ← • Q ← V[G] • while Q ≠ • do n ← EXTRACT-MIN(Q) • S ← S + {n} • for each arc aAdj[n] • do RELAX(n,v, w)
Application to the UAV case. • The field is being represented as an Adjacency Matrix. • For a grid of the dimensions nodes, create a matrix of the dimensions where matrix value in the row i and column j is:
Application to the UAV case. • For iteration number k update the map : while: And update the visited preferred areas. • The runningtime for n nodes and m=8n edges in current configuration is O(n(n+8))=O(n^2).(n=resX*resY)
Simulation Results - The width of the path. Path Width=2 Path Width=1 The width of the path is a factor of an efficiency of the patrol. The wider path has smaller probability to be a ’useless’ sortie.
Simulation Results-The size of the preferred area. Radius = 2 Radius = 4 • The vertices leading toward the preferred area has relatively law weight. • The radius around this area reflects the relative priority of this area. • The bigger radius causes higher priority of the region which defines how fast the UAV will choose to visit this area.
Simulation Results - The target location relative to the shortest path. • “Shortest Path” definition: the shortest route connecting the initial and the final points (bases) on a map with no hazards and no preferred areas. • Intuition: if the distance of the target from the shortest path is bigger, it is harder to find it -more sorties are needed. • Results of two simulations for two different distances are presented.
Simulation Results - The target location relative to the shortest path. • Two results are not sufficient for final conclusions. • Two different aspects are found to be interesting for dipper investigation: 1. The correlation between the distance of the target from the ‘main’ (shortest) route, and the number of sorties needed to reveal the target. 2. The connection between the different Hazards densities, and the average number of sorties needed for detection.
Simulation Results - The target location relative to the shortest path. • The graph presents the number of sorties needed to reveal the target via the distance of the target from the “shortest path”. (for fixed hazards density-10 hazards) • The more distant the target is located, the higher the number of the sorties which are needed for detection.
Simulation Results - The target location relative to the shortest path. • The graph presents the number of needed sorties via distance from the “shortest path” for different hazard density levels:10-60Haz/Field. • The same behavior takes place for the fields with different hazard density.
Simulation Results - The target location relative to the shortest path. • The graph presents the average number of sorties via increasing Hazard Density. • An increase of the density yields an easier reveal of the target, until the optimum is reached. • After the optimum point, the task is becoming harder. Why? • An increase of low density means searching in fewer regions. • An increase of high density means searching inside a labyrinth.
Application for Multi UAV search. • Simulation scenario : Number of UAVs=2 4 bases 50 hazards 18 Preferred Areas 1 Target • The UAV Group is provided an updated map of hazards and preferred areas. • Each UAV updates the map according to its planned sortie. • Serial planning: each UAV plans its route taking into account the plans of other group members.
Animation-Multi UAV search. Legend : • Blue Six Pointed Stars-Bases 1-4. • Yellow Dots-Preferred areas. • Red Dot-The Target. • Red Trace-UAV1. • Blue Trace-UAV2. • The Hazards represent the terrain. • Result: The patrol area is being divided between two UAVs into the inner and the outer parts.
Conclusions: • We have examined Several methods for solving the Patrol & Search problem. • We have found Dijkstra algorithm to be the most promising one. • For each application the right parameters have to be found and tuned. • For the simulated conditions: • The path width = 2 nodes. • The preferred area radius = 2 nodes. • 40% Hazards density has been found to be the optimum. • The project results show the practical applicability of the “shortest path” problem solved using the Dijkstra algorithm for: • Sorties planning for multiple/single UAV. • Search/Patrol performed by multiple/single UAV.
Thanks… • To Dr. Mark Moulin for the guidance. • To the rest of you for your attention.