Download
1 / 19
190 likes | 281 Views
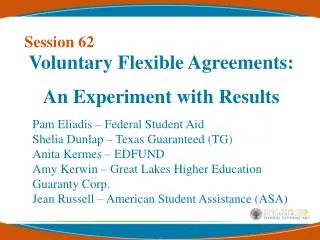
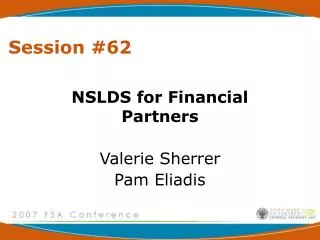
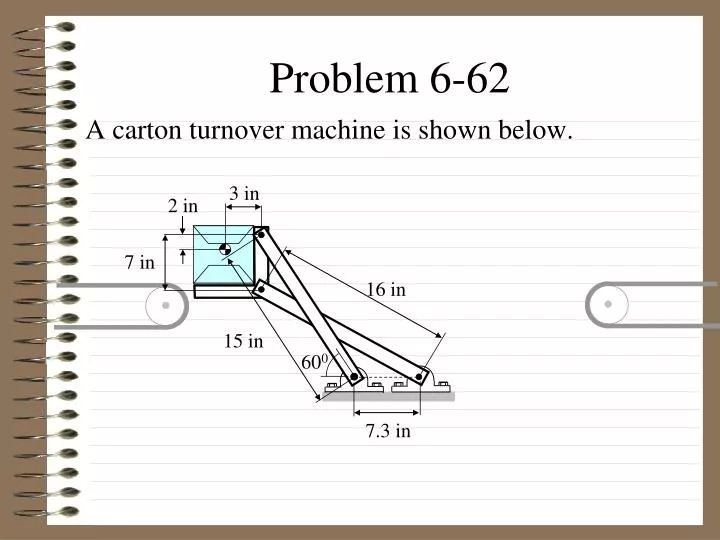
3 in. 2 in. 7 in. 16 in. 15 in. 60 0. 7.3 in. Problem 6-62. A carton turnover machine is shown below. Problem 6-62. At the instant shown, the 15 in link is driven clockwise at 5 rad/sec, and decelerating at

E N D
3 in 2 in 7 in 16 in 15 in 600 7.3 in Problem 6-62 A carton turnover machine is shown below.
Problem 6-62 At the instant shown, the 15 in link is driven clockwise at 5 rad/sec, and decelerating at 40 rad/sec2. Determine the instantaneous torque required to operate the 15 in arm, and the forces at the two lower bearings. The two long links closely resemble slender members, made from steel, with a width of 1 in and a thickness of 0.25 in. The carrier and carton weigh 26 lb and its mass moment of inertia, relative to an axis through its center, is 2.75 lb in s2.
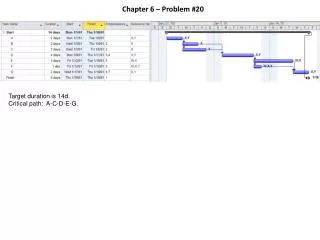
3 56.30 B 2 3 4 3.6 2 G3 7 5.83” 15” 310 G2 C G4 16” 600 A D 220 7.3” Kinematic Diagram
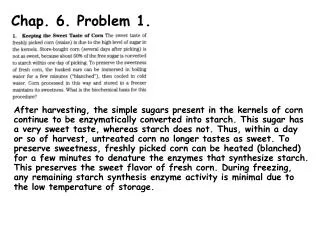
to G3C to CD VG3/C VG3/B VC/B to CB VG3 to G3B VC VB = 75 in/s Velocity Analysis VB = w2 rAB = (5 rad/s)(15 in) = 75 in/s VC = VB +> VC/B VG3 = VB +> VG3/B = VC +> VG3/C
Velocity Results • VC = 40.4 in/s 680 • VC/B = 49.8 in/s • VX/B = 25.6 in/s 56.30 • VX/C = 41.5 in/s 310 • VG3 = 77.7 in/s 490 • VG2 = 37.5 in/s 300 • VG4 = 20.2 in/s 680
anC = (40.4)2/16 = 102.0 in/s2 22.00 • anC/B = (49.8)2/7 = 354.3 in/s2 • anG3/C = (41.5)2/5.83 = 295.4 in/s2 59.00 • anG3/B = (25.6)2/3.6 = 182.0 in/s2 33.70 • atB = (15)(40) = 600.0 in/s2 30.00 Acceleration Analysis • anB = (75)2/15 = 375.0 in/s2 60.00
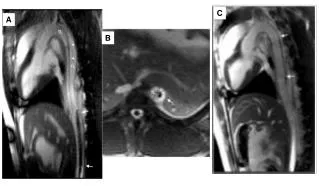
anC aC atC aB to CD anB to CB atC/B anC/B atB Acceleration Analysis anC+>atC= anB+>atB+>anC/B+>atC/B
atC/B = 332.7 in/s2 • aB = 707.5 in/s2 620 • aG2 = 353.8 in/s2 620 • aC = 270.7 in/s2 • aG4 = 135.4 in/s2 Acceleration Analysis • atC = 250.8 in/s2 68.00 • a4 =(250.8)/16 =15.68 rad/s2 ccw • a3 =(332.7)/7 =47.53 rad/s2 ccw
anC • aG3 = 672 in/s2 830 atC aG3 to G3B anB atC/B anG3/B anG3/C anC/B to G3C atB atG3/C atG3/B aG3= aB+>anG3/B+>atG3/B = aC+>anG3/C+>atG3/C
FiG2 15 in 600 • aG2 = 353.8 in/s2 620 • FiG2 = (1.13 lb)(353.8 in/s2)/(386.4 in/s2) • = 1.03 lbs620 Inertia Forces: Link 2 • Vol2 = (16 in)(1 in)(.25 in) = 4 in3 • W2 = (.283 lb/in3)(4 in3) = 1.13 lb
TiG2 • TiG2 = (0.19 lb in s2)(40 rad/s2) • = 7.5 lb in cw Inertia Forces: Link 2 FiG2 • a2 = 40 rad/s2 ccw 15 in • Assume slender rod 600 • IG2 = ¼ [(1.13 lb)/(386.4 in/s2)](16 in)2 • = 0.19 lb in s2
FiG3 TiG3 • FiG3 = (26 lb)(672 in/s2)/(386.4 in/s2) • = 45.2 lbs 830 • aG3 = 672 in/s2 830 • TiG3 = (2.75 in lb s2)(47.53 rad/s2) • = 130.7 in lbs cw Inertia Forces: Link 3 • a3 =47.53 rad/s2 ccw
FiG4 • aG4 = 135.4 in/s2 220 16 in • FiG4 = (1.20 lb)(135.4 in/s2)/(386.4 in/s2) • = 0.42 lb Inertia Forces: Link 4 • Vol4 = (17 in)(1 in)(.25 in) = 4.25 in3 • W4 = (.283 lb/in3)(4.25 in3) = 1.20 lb
TiG4 220 16 in • TiG4 = (0.22 lb in s2)(15.68 rad/s2) • = 3.4 lb in cw Inertia Forces: Link 4 FiG4 • a4 = 15.68 rad/s2 ccw • Assume slender rod • IG4 = ¼ [(1.20 lb)/(386.4 in/s2)](17 in)2 • = 0.22 lb in s2
FiG3 TiG3 Bx Bx By FiG2 By Cx W3 TiG2 Cy TA W2 Cx Ax FiG2 Ay Cy TiG4 W4 Dx Dy Free Body Diagrams
SMA = 0 Bx[15(sin60)] + By[15(cos60)] + W2[7.5(cos60)] - TiG2 - TA - [FiG2(sin62)][7.5(cos60)] – [FiG2(cos62)][7.5(sin60)]= 0 FBD: Link 2 Bx SFx = 0 Ax - Bx + FiG2 cos62 = 0 TiG2 FiG2 By 620 W2 TA SFy = 0 Ay - By +FiG2 sin62 - W2 = 0 600 15 in 7.5 Ax Ay
FiG3 TiG3 2 in Bx 830 7 in By Cx W3 3 in Cy FBD: Link 3 SFx = 0 Bx + Cx + FiG3 cos83 = 0 SFy = 0 By + Cy + FiG3 sin83 – W3 = 0 SMc = 0 W3(3) - Bx(7) - (FiG3 sin83)(3) - (FiG3 cos83)(5) - TiG3 = 0
16 in Cx FiG4 8 Cy TiG4 220 W4 Dx Dy SMD = 0 Cx[16(sin22)] + Cy[16(cos22)] + W4[8(cos22)] - FiG4[8(cos22)]- TiG4 = 0 FBD: Link 4 SFx = 0 Dx - Cx = 0 SFy = 0 Dy - Cy + FiG4 - W4 = 0
Ax = -23.3 lbs Ay = -11.5 lbs Bx = -22.8 lbs By = -11.7 lbs Cx = 17.3 lbs Cy = -7.2 lbs Dx = 17.3 lbs Dy = -6.4 lbs TA = -394.1 in lbs Finally, Solving the Nine Simultaneous Equations: