Download
1 / 65
650 likes | 786 Views
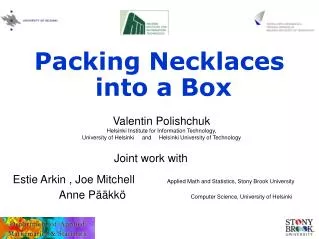
Packing Rectangles into Bins. Nikhil Bansal (CMU) Joint with Maxim Sviridenko (IBM). Problem. Given: Collection of rectangles (by height, width) Goal : Pack in min # of unit square bins Rectangles parallel to bin edges Cannot be rotated. Rectangles. 4. 5. 3. 6. 1. 2. 6. 6.

E N D
Packing Rectangles into Bins Nikhil Bansal (CMU) Joint with Maxim Sviridenko (IBM)
Problem Given: Collection of rectangles (by height, width) Goal : Pack in min # ofunit square bins • Rectangles parallel to bin edges • Cannot berotated Rectangles 4 5 3 6 1 2 6 6 1 1 2 2 Bins 3 3 4 4 5 5
Problem Given: Collection of rectangles (by height, width) Goal : Pack in min # ofunit square bins • Rectangles parallel to bin edges • Cannot be rotated Rectangles 4 5 3 6 1 2 3 3 1 1 2 2 6 6 2-d Bin Packing 4 4 5 5
Motivation Many Applications: Real World packing of (real world) bins • Placing ads in newspapers • Cloth cutting: Minimizing sheets to buy • Truck Loading • Memory allocation in paging systems • …
1-d Bin Packing Special case of 2-d packing 1-dim bin packing: Collection of intervals withlength in [0,1], Pack into min # of unit bins 4 3 2 ! 2 4 1 1 3
1-d Bin Packing Special case of 2-d packing 1-dim bin packing: Collection of intervals withlength in [0,1], Pack into min # of unit bins (NP-Hard) 4 3 2 ! 2 4 1 1 3
Approximation algorithms An algorithm is a approximation ( > 1) if • runs in polynomial time • Value of solution · Opt Opt: value of optimum solution Polynomial time approximation scheme (PTAS) is a family of 1+ approximation algorithms for every > 0. E.g., Running Time
1-d bin packing: Inapproximability Cannotget a poly time approximation < 3/2 Partition problem (NP-Hard): Given s1,…,sn , S= s1+s2,…,sn 9 a subset of elements that sums to exactly S/2 ? s1 s2 s3 s4 s5 s6 S/2 S/2 But maybe can getOpt + 1 in poly time ?
Asymptotic PTAS Alg · (1+) Opt + f() f() depends only on e.g. (1/)(1/) For 1-d bin packing: Alg · (1+) Opt + O(1/2) [de la Vega, Lueker 81]
Outline • Introduction • APTAS for 1-d packing [de la Vega, Lueker 81] • Results for 2-d packing • Conclusions
APTAS for 1-d bin packing Theorem:[de la Vega, Lueker 81] Alg(I) · Opt(I)/(1-) + 1/2 ¼ Opt(I) (1+) + f() 4 3 2 ! 2 4 1 1 3
Main idea Simplify Original instance I -> I’ • I’: easy to solve • Solutions of I and I’ close (within 1+)
Ideas applied to 1-d packing ·: Small ¸: Big 1) I ! I’ with 1/2different big sizes & solns. within 1+ 2) I’ easy: If k= O(1) different big sizes, can get Opt + k
1-d: Rounding to a simpler instance I 0 1 Various object sizes
1-d: Rounding to a simpler instance Ib :I restricted to bigs. Let b = # of bigs (i.e. ¸) Ib 0 1 1 Various object sizes
1-d: Rounding to a simpler instance Ib :I restricted to bigs. Let b = # of bigs (i.e. ¸) Partition big into 1/2 groups, each group has b¢2 objects Ib (here b¢2 =3) 0 1
1-d: Rounding to a simpler instance Ib :I restricted to bigs. Let b = # of bigs(i.e. ¸) Partition big into 1/2 groups, each group has b¢2 objects Ib 0 1 Instance I’b : Ignorelargest b ¢2 objects. Round up sizes to smallest size in next higher group I’b 0 1
1-d: Rounding to a simpler instance Ib :I restricted to bigs. Let b = # of bigs (i.e. ¸) Partition big into 1/2 groups, each group has b¢2 objects Ib 0 1 Instance I’b : Ignorelargest b ¢2 objects. Round up sizes to smallest size in next higher group I’b 0 1 Alg(I’b) · Alg(Ib)
1-d: Rounding to a simpler instance Ib :I restricted to bigs. Let b = # of bigs (i.e. ¸) Partition big into 1/2 groups, each group has b¢2 objects Ib 0 1 Instance I’b : Ignorelargest b ¢2 objects. Round up sizes to smallest size in next higher group I’b 0 1 Alg(Ib) · Alg(I’b) + b 2
1-d: Rounding to a simpler instance Ib :I restricted to bigs. Let b = # of bigs (i.e. ¸) Partition big into 1/2 groups, each group has b¢2 objects Ib 0 1 Instance I’b : Ignorelargest b ¢2 objects. Round up sizes to smallest size in next higher group I’b 0 1 Alg(I’b) · Alg(Ib) · Alg(I’b) + b 2
1-d: Rounding to a simpler instance Ib :I restricted to bigs. Let b = # of bigs (i.e. ¸) Partition big into 1/2 groups, each group has b¢2 objects Ib 0 1 Instance I’b : Ignorelargest b ¢2 objects. Round up sizes to smallest size in next higher group I’b 0 1 Alg(I’b) · Alg(Ib) · Alg(I’b) + b 2 Opt(Ib) ¸ b ) b 2· Opt(Ib)
1-d: Solving the “few and big” case I’b : 1/2 different sizes > . Call these s1,…,sk . Configuration: A way to pack a bin (Eg: C = [3 s1, 17 s3, 5 s18]) |Configurations| · (1/2)1/ = O(1) xi : # of bins with configuration i nj : # of objects of size sj in instance cij: # of objects of size sj in configuration i. Minimize i xi i cij xi¸ nj8 j 2 [1,..,1/2] xi¸ 0 8 i, xi2 Z IP for I’b
1-d: “Few and Big” using LP Minimize i xi i cij xi¸ nj8 j 2 [1,..,1/2] xi¸ 0 (Relaxed to be fractional) Clearly, LP (Ib’) · OPT(Ib’) xi could be fractional. Round up to next integer ( Eg: 17.34 -> 18) Adds ·# configurations = (1/2)1/ = O(1) In fact, adds · 1/2 (non-zero xi’s in basic soln)
1-d: Filling in the smalls So, Alg(Ib) · Opt(I)/(1-) + 1/2 Packing smalls: • In each bin, fill as many smalls as possible. • If bins not enough, open new bins to fill smalls. Proof: • Ifno new bins opened, done. • If new bins opened, all bins (except maybe last) filled 1- So, Alg(I) · Area(I)/(1-) + 1 · Opt(I)/(1-) + 1
1-d: Overview 0) Partition into small and big 1) Pack small objects later 2) Round large objects to O(1) sizes. Solve the “few and big” case almost optimally.
Outline • Introduction • APTAS for 1-d packing [de la Vega, Lueker 81] • Results for 2-d packing • Conclusions
Outline • Introduction • APTAS for 1-d packing [de la Vega, Lueker 81] • Results for 2-d packing • Square packing problem • General rectangle packing problem • Conclusions
Square Packing Problem Given a collection of squares (hypercubes for d>2) Pack into min # of unit bins. 1 1 1 4 2 2 ! 2 5 3 3 5 5 4 4 6 6 7 7 6 3 7
Square Packing: Previous Work 2-dim: 2.125 [Chung, Garey, Johnson 82] …… 1.454 [Epstein, van Stee 03] d-dim: (3/2)d[Coppersmith, Raghavan 89] …… 2-(2/3)d[Kohayakawa et al 02] We give an APTAS (i.e., Alg(I) · 1+ Opt(I) + f() )
Outline • Introduction • APTAS for 1-d packing [de la Vega, Lueker 81] • Results for 2-d packing • Square packing problem • O(1) Approximation • APTAS • General rectangle packing problem • Conclusions
O(1) Approximation: Square Packing Opt ¸ Total areaof squares in I. If we can use constant fraction of area in each bin )O(1) approximation. Eg: If use ¸ 1/100th area in each bin ) 100 approx
O(1) approximation: Square Packing If big (length ¸ 1/3), put in its own bin. Use ¸ 1/9th area. Big uses > 1/9th area Need a way to pack small objects efficiently.
Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s a b
Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. • Take squares in decreasing size • Place sequentially a 1 2 3 b
Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. • Take squares in decreasing size • Place sequentially • If next does not fit, • open a new shelf a 1 2 3 b
Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. • Take squares in decreasing size • Place sequentially • If next does not fit, • open a new shelf 4 a 8 1 3 b
9 16 4 8 1 3 Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. • Take squares in decreasing size • Place sequentially • If next does not fit, • open a new shelf a b
9 16 4 8 1 3 Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. Wasted Space · s(a+b) a b
9 16 4 8 1 3 Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. Wasted Space · s(a+b) Right side: At most s £ a a b
9 16 4 8 1 3 Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. Wasted Space · s(a+b) Right side: At most s £ a Top · s16 b a b
9 16 4 8 1 3 Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. Wasted Space · s(a+b) Right side: At most s £ a Top · s16 b Shelf 1: (s1 –s3) b a b
9 16 4 8 1 3 Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. Wasted Space · s(a+b) Right side: At most s £ a Top · s16 b Shelf 1: (s1 –s3) b Shelf 2: (s4 – s8) b … a b
9 16 4 8 1 3 Shelf Packing Given a rectangular region of size a £ b Goal: Pack squares of length · s Algorithm: Decreasing size shelf packing. Wasted Space · s(a+b) Right side: At most s £ a Top · s16 b Shelf 1: (s1 –s3) b Shelf 2: (s4 – s8) b …. Adding all, at most (s1-s16) b a b
Square Packing: Packing Smalls If all squares · s, waste in a £ b region · s(a+b) If a=b=1, s · 1/3 )Waste · 2/3 O(1) approximation follows.
Outline • Introduction • APTAS for 1-d packing [de la Vega, Lueker 81] • Results for 2-d packing • Square packing problem • O(1) Approximation • APTAS • General rectangle packing problem • Conclusions
Square Packing 0 1 Squares with various lengths
Square Packing G1/ -1 Gm G1 G0 m+1 1/ … m … 2 1 0=1 0
Square Packing G1/ -1 Gm G1 G0 m+1 1/ … m … 2 1 0=1 0 Small Medium Big Gm =[ m+1,m)be such that area · (total area)
Square Packing G1/ -1 Gm G1 G0 m+1 1/ … m … 2 1 0=1 0 Small Medium Big Gm =[ m+1,m)be such that area · (total area) Pack medium in separate bins using O(1) approx Adds at most O() to the number of bins. Ignore medium jobs from now on.
Square Packing G1/ -1 G1 G0 m+1 1/ … m … 2 1 0=1 0 Small Big Gm =[ m+1,m)be such that area · (total area) Pack medium in separate bins using O(1) approx Adds at most O() to the number of bins. Ignore medium jobs from now on.