Download
1 / 55
590 likes | 854 Views
ABSTRACT (EXECUTIVE SUMMARY) Engine Control System for the Advanced Light Helicopter (ALH) BY Mr. B.P. RAO Mr. K.M.BHAT L.RAJASHEKAR (ROTARY WING RESEARCH AND DESIGN CENTRE)

E N D
ABSTRACT (EXECUTIVE SUMMARY) Engine Control System for the Advanced Light Helicopter (ALH) BY Mr. B.P. RAO Mr. K.M.BHAT L.RAJASHEKAR (ROTARY WING RESEARCH AND DESIGN CENTRE) This paper gives a brief overview of the engine requirements and hence its control system requirements for a modern helicopter based on flight requirement and design philosophy. Second part gives a brief insight into the • Engine modules • Basic control architecture • Basic fuel system configuration • Control system operation • Indication and monitoring • Control laws
INTRODUCTION : ALH is integrated with two Turbomeca TM333-2B2 Engines. These engines are controlled by dedicated single channel FADEC. The control system is designed to adapt the engine to the helicopter power requirements while remaining within defined limits. Basic principle is to maintain the output shaft rpm at the datum value at zero to maximum power level throughout the operating envelope of the helicopter. On TM 333-2B2 engine, the Engine Electronic Control Unit achieves this by controlling the fuel flow and inlet guide vane positions depending on the operating condition and power demand.
A typical power required vs speed for a given altitude and AUW (All Up Weight) is shown in Fig. 1 along with the components of power requirements. The engine power limits of a typical helicopter are also shown. Fig.2 shows the Power required vs AUW and altitude (since the power and weight are normalised with density ratio) and the flight test validation of the same. Fig. 3 and 4 show the power and fuel flow with altitude for a given AUW. Fig. 5 shows the variation of power with bleed (power for the actual engine is kept constant even with bleed) at the expense of fuel.ALH is integrated with two Turbomeca TM333-2B2 Engines. These engines are controlled by dedicated single channel FADEC.
SINGLE ENGINE PERFORMANCE REQUIREMENTS AND TESTS Helicopters have specific requirements like constant rotor rpm under all operating conditions, zero to maximum torque, autorotation, ‘g’ maneuvers, single engine new additional requirements for multiengine helicopters etc. Turbo-shaft engine have requirements like large gas generators speed variation, minimum turbine entry temperature and fuel flow function, etc. To cater for all these requirements the principle is to control fuel flow and air flow into the engine. A fixed wing aircraft requires a landing strip for take off and landing. In the event of full engine failure, it requires a set of procedures and capability (a high glide ratio for all engine failure cases) and reduced speed with sideslip for multiengine aircrafts, apart from a proper landing strip.
A helicopter can hover and it too has a defined envelope and procedures for flight in case of single engine failure.. The first is the H-V i.e. the hover and speed regime for a safe recovery in case of single engine or two engine failure. The second is the take off and landing in case of one engine failure for civil operation called as CAT-A and CAT-B operation. The third is in the event of all engine failure, the helicopter can land safely (provided a safe spot is available) in oblique descentoreven in vertical descent by autorotation. Here the potential engine of the helicopter is converted into rotational energy of the rotor to give a lift for a safe touchdown. The first two single engine operations are briefly described below.
HEIGHT VELOCITY (H-V) DIAGRAM For every helicopter, whether it is single engine or multi engine, there exists an envelope of initial velocities and heights from which a helicopter cannot land/flyway safely in the event of an engine failure. Height Velocity diagram consists of three main points (as shown in Fig. 6), they are, • High Hover Point (HHP) • Low hover point (LHP • Knee point • Fig.7 shows the engine power variation (Actual Tests) during H-V Diagram Testing.
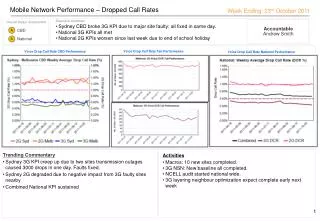
CAT–A AND CAT–B PERFORMANCE The Category A helicopter must be • Multi engine • Each engine should have separate controls and independent fuel system such that failure of one engine should not hamper the operation of other engine. • It should have stay up capability. In the event of engine failure, it should have minimum rate of climb. The Category B helicopters • May be single or multi engine • Need not have stay-up capability • Normally certified for higher AUW and altitudes compared to CAT-A helicopters, as they have to land immediately in the event of engine failure. • A typical CAT-A Take Off is shown in Fig. 8 and the actual flight test • demonstration is shown in Fig. 9.
Vy (65 Kts) ICR rating (30 min) ROC 150 ft/min Accn. From vtoss to vy 1000 ft Vtoss (2 .5 min OEI rating) (MCR)ROC 100 ft/min TDP(40 ft, 40 kts) 200 ft 40 ft IGE 6 ft TYPICAL FLIGHT TAKE OFF PATH FOR CAT-A OPERATION FIG. 8
The main objective of this paper is the engine control system which can be discussed in more detail with an understanding of the main engine requirements. Engine control system on ALH is configured with FADEC (Full Authority Digital Engine Controls) and associated controls and sensors. The main functions of the FADEC are: - Automatic starting - Output Speed control - Inlet Guide Vane (IGV) control - Automatic fuel flow control - Various limitation function - Auxiliary Power Unit (APU) mode control - Over speed protection - Engine usage monitoring - Maintenance/diagnostic aid - One Engine Inoperative (OEI) Training mode
ENGINE GENERAL DESCRIPTION • This description considers the main functional components of the engine • Gas generator • Annular air intake • Two stage axial compressor with variable inlet guide vanes • Single stage centrifugal compressor • Annular reverse flow combustion chamber with vaporiser fuel burners • Single stage axial turbine. • Power turbine • Single stage axial turbine with co-axial shaft • Exhaust pipe • Direct axial exhaust pipe. • Reduction gear box • Reduction gear box train comprising three helical gears • Forward output shaft • Accessory drive train
Installation requirements The main functional requirements of the installation are : Constant rotor rotation speed NR in all operating conditions - Max torque limit C (usually imposed by the aircraft transmission) - Complete engine protection (N1 and N2 speeds, TET. acceleration control ∆N1/∆t ...) - Good load sharing (in the case of a multi-engine configuration). Adaptation to requirements To have a constant rotation speed of the power turbine N2. the power supplied by the engine is automatically adapted to the demand. This adaptation is ensured by the control. system which meters the fuel flow injected into the combustion chamber so as to deliver the required power (variation of the gas generator N I rotation speed) while keeping the engine within its operational limits. • Power transmission • The mechanical power supplied hy the engine. is used to drive the helicopter rotors through a mechanical transmission. • This power drives: • The main rotor • The tail rotor • The main gearbox • Twin engine configuration • In a twin engine configuration, the engines arc installed at, (the rear of the main gearbox. • In a twin engine configuration, the engines arc installed at, (the rear of the main gearbox. • The power turbines of the two engines are mechanically connected to the main gearbox which drives the rotors (main and tail rotors).
FUEL SYSTEM – DESCRIPTION The fuel system includes the following components: Booster pump (low pressure aircraft system) Low pressure pump / Alternator unit This unit includes a centrifugal low-pressure pump and an alternator to electrically supply the Digital Engine Control Unit Fuel filter The fuel filter includes a filtering element, a pre-clogging pressure switch, a by-pass valve and a filter-clogging indicator. High pressure ,pump and metering unit This unit includes a gear type high pressure pump fitted with a pressure relief valve. It also has a metering unit which includes: - A constant ∆P valve A manual metering valve A fuel metering unit (controlled by the DECU) - A stop electro-valve (of bi-stable type). It opens during shut-down. • Inlet guide vane actuator • This actuator receives HP pump outlet pressure. • Valve assembly • The assembly includes: • - A start electro-valve for start injector supply during starting • - A pressurising valve which gives fuel supply priority to the start injectors • - A flow divider which gives supply preference to one of the main injectors • A manual purge valve • A main injector purge valve • Fuel injection system • - 4 start injectors, fitted around the combustion chamber casing • -12 main injectors. Pre-vaporising injectors installed at the rear of the combustion chamber casing • . • Indicating devices • - Low fuel pressure switch
FUEL SYSTEM - OPERATION (1) This part deals with the following operating phases: prestart, starting, normal operation, manual control and shutdown. Pre-start - The LP and HP pumps do not operate and there is no pressure in the system The constant ∆P valve is closed The stop electro-valve is in the "stop" position The start electro-valve is in ventilation position The pressurising valve is closed -The flow divider is closed -The manual metering valve is in the "neutral" position -The metering unit can be in any position. During the electrical power up, the metering unit is initialised.
VARIABLE INLET GUIDE VANE SYSTEM- DESCRIPTION –OPERATION Description The variable inlet guide vane system comprises a row of the vanes fitted in the front compressor casing before the Ist stage axial compressor. Each vane has a lever connected to its outer end and each lever is connected to a common actuating ring around the outside of the casing The actuating ring is connected by an actuating rod to the hydraulic actuator The actuator receives fuel pressure from the outlet;et of the HP fuel pump. It also has an electrical connector through which it is connected to the DECU. Operation The angle of the variable inlet guide vanes is determined by the DECU as a function N1 and T1 The DECU sends signals to the actuator to vary the fuel pressure either side of a hydraulic piston, thus actuating the rod and causing the vane angle to vary.
IGV actuator • Fuel injection system • Start injectors • Main injection system • Electrical components • Indicating system sensors • Control system sensors • Dedicated alternator • Ignition unit • Starter-generator • Digital Engine Control Unit(DECU) • This control unit controls and monitors the engine. • Digital type • Installed in the aircraft • Serial data link (connection with the aircraft) • Control system –description • The complete system includes aircraft components, engine components and the DECU • Aircraft components • Control components (analog and logic signals) • Indicating components (instruments,lights….) • DECU electrical supply • Start and stop control logic • Engine components • Hydro mechanical components • Fuel control • LP pump • Filter • HP pump • Metering unit (with manual control) • Stop electro-valve • Valve assembly • Start electro –valve • Pressurizing valve • Flow divider valve
CONTROL SYSTEM – OPERATION (2) Functions ensured by the electronic control system This part mentions in a general way the main functional electronic blocks Selection of the control mode Start control N2 speed control Anticipation IGV control Limitations (N1 ,torque..) N1 speed control Flow limitation Control of the metering valve Overspeed protection APU mode Monitoring Data bus interfaces with the air craft Fault detection and indication Cycle counting ΔN1 indication calculation Counting and indicating of engine usage Engine operating hours
CONTROL SYSTEM –OPERATION (3) • Starting • This function includes the staring sequence ,the starting fuel flow control ,idling ,the transition from idle to flight and restart in flight • Starting sequence • The system ensures the cranking (starter),ignition • ( ignition unit) and the fuel supply. • Start is selected using the Stop –Start –Flight selector • Stop (selection of engine shut –down) • Start (start control up to idle) • Flight (normal control) • In – flight start • The sequence is identical to a ground start ,but only permitted below 17%N1 • It the start is selected above 17%N1 the DECU will wait until N1 < 17% before initiating the start. • Starting fuel flow control • During staring the fuel flow CH is metered so as to provide a rapid start without over temperature • To this end, the fuel flow is controlled according to different laws: • Basic flow law as a function of T1 and residual t4.5 gas temperature. • Starting flow law as a function of N1 acceleration (ΔN1 /Δt) • Flow correction law as a function of t4.5 indexed proportional; to N1. • The elaborated fuel flow datum CH* is used to control the metering valve via: • Choice datum • Metering valve control,depending on the datum
CONTROL SYSTEM –OPERATION (4) Idle when starting is completed ,the rotation speed stabilises at idle (94 % N2 if idle has been selected ) Transition from idle to flight This is effected by moving the selector from start /training to flight During the transition the torque and N2 acceleration are limited The transition is completed when the system enters in to nominal speed control Control functions Transition control Speed control (N2 ,N1 ,limitation) Selection of fuel flow datum CH* Flow control Metering valve control
CONTROL SYSTEM –OPERATION (5) • Control – general • Installation configuration • The gas generator supplies power to the power turbine which is connected to the helicopter main rotor. • Installation requirements • Aircraft rotor speed (NR) almost constant in all operating conditions (because of the rotor efficiency)whatever the load applied. • Max torque limitation (imposed by the mechanical transmission and the helicopter main gearbox). • Power turbine rotation speed (N2) within given limits (in fact almost constant,as it is connected to the rotor) • Limitation of the gas generator rotation speed N1 : • Max N1 • Min N1 (to avoid engine flame –out and critical speeds.) -Protection against surge ,flameout, overtemperature…. Adaptation to requirements The control system ensures the engine adaptation to the requirements by metering the fuel flow CH sprayed in to the combustion chamber. Thus, the gas generator adapts automatically to the requirements (N1 demand) to maintain constant the power turbine rotation speed N2 whilst keeping all the other parameters within determined limits. This adaptation is illustrated by : The diagram W/N1,N2 whish illustrates the power W,the max torque C and rotation speeds N1 and N2. The diagram N1.N2 which illustrates the N1/N2 relation curve.
CONTROL SYSTEM –OPERATION(6) • Speed control –general • Control loop • The control loop comprises essentially : • An anticipator linked to the helicopter collective pitch lever. • A power turbine (N2) controller • An N1 limiter for max and min N1,acceleration . • An N1 controller • A fuel flow limiter (CH) for max and min flow ,anti flame –out,anti-surge. • A fuel flow controller to control the fuel metering valve.
Operating principle. In this type of control system the position of the helicopter collective pitch lever ,which represents the power required ,determines the basic N1 datum .This function ,which is called the anticipator, permits an initial adaptation of the gas generator speed to balance the power supplied with the power required and thus maintain the N2 constant. Further more the anticipator supplies an immediate signal for a load variation ,which the detection time and provides a rapid reaction of the control system. However this first reaction is not sufficient ,as the power requires depends on other factors. The basic datum is modified by the N2 controller ,which is a proportional controller ,after comparing the difference between a datum ,the nominal NR and the measured N2.thus the N2 ,and therefore the NR, are maintained constant without static droop. The N1 datum is thus elaborated as a function of the anticipator and the N2 controller The N1 datum is then limited in order to assure certain functions such as rating stops, acceleration and deceleration control,torque limiting…
The N1 controller is integral and treats the difference between the N1 datum and the actual N1.It translates the difference in to a fuel flow datum CH, in order to maintain the N1 constant without static droop The fuel flow limiter then modifies this datum in order to assure certain protection functions such as anti – surge ,anti flame –out etc. Finally the fuel flow datum is treated to give a signal to the metering unit which determines the actual fuel flow injected it to the combustion chamber ,which determines the operation of the gas generator ,particularly the rotation speed N1
CONTROL SYSTEM – OPERATION (7) The control loop comprises N2 control ,anticipation, N2 datum selection ,limitations and N1 control. N2 (Free turbine rpm) control The N2 controller is a proportional type controller ,that is ,it has no static droop .The controller treats the difference between a datum N2* and the actual N2. The N2 datum is calculated according to the control mode: idle ,flight, training flight. It is also dependent on aircraft altitude. There is an N2 Trim selector (Low-Normal-High) for the two engine, which permits the pilot to select the NR speed. Anticipation Load variations are anticipated by a signal from a potentiometer linked to the collective pitch lever. This signal ,XCP ,acts on the N1 datum. N1 limiter The N1 datum is limited to assure various limitations (details on the following pages N1 control The N1 controller is an integral controller ,that is without static droop.This controller treats the difference between the datum and the actual N1 and elaborates the necessary fuel flow datum CH* Example of transitory control In the case of an increase of load the control system responds and increases the fuel flow CH.The N1 increases in order to maintain N2 constant. APU mode A cockpit selector permits the selection of APU mode on No.1 engine only. Selection of APU mode energises an electric clutch which allows the engine to drive the aircraft electric generator.
Torque limitation The N1 datum is also limited to prevent overtorque of the helicopter main gear box .These torque limits are also calculated as a function of N2. Acceleration and deceleration control During acceleration ,the rate of change of the N1 datum is limited in order to avoid surge caused by overfuelling.The rate of change (ΔN/Δt)is modified as a function of P0 and T1 . The system includes a more limiting recovery law which is used in the event of the P3 signal becoming defective. During deceleration,the rate of change of the N1 datum is limited to prevent flame –out during rapid deceleration. Note: The lowest demand (thermal or torque ) will determine the limit.
CONTROL SYSTEM -OPERATION (15) Overspeed The DECU includes an optional power turbine overspeed shut-down system. This system will shut-down the engine if the power turbine speed reaches a certain limit. This function is ensured by a specific board which is separated from the control boards (channels A and B). The overspeed logic includes two sub-Logics : -One measures the channel A N2 signal, compares it with the oyerspeed threshold and supplies the negative of the stop electro-valve in case of oyerspeed. -The other measures the channel B N2 signal, compares it with the overspeed threshold and supplies the positive of the stop electro-valve in case of overspeed. Thus, when both sub-logics detect an overspeed, and only in this case, the engine is shut-down.
Re-arming Once operated the system remains in the overspeed condition until it is re-armed, either;by a push button . Cross inhibition The system is designed to prevent both engines being shut down by their overspeed systems. This is achieved by a cross connection between the two DECUs, when one engine overspeed system operates it inhibits the overspeed function of the other system. System indication The overspeed system provides self monitoring signal by means of warning lights One light (OVSP MNTR) indicates the situation of the system failure- armed or dis-armed. One light (ENG OVSP) indicates the true overspeed situation and that the system has operated. Fault detection A test circuit simulates an overspeed in order to verify the correct operation. The test is selected by pressing a push button. After a test the system is re-armed by depressing the re- arming push button. During the test and after, the situation of the system (failure -rearmed) is indicated by the warning lights. The unit with overspeed test and rearming buttons is located in the rear fuselage.
CONTROL SYSTEM -OPERATION (16) Operating principle In this type of control system the position of the helicopter collective pitch lever, which represents the power required, determines the basic N1 datum. This function, which is called the anticipator, permits an initial adaptation of the gas generator speed to balance the power supplied with the power required and thus maintain the N2 constant. Furthermore the anticipator supplies an immediate signal for a load variation, which reduces the detection time and provides a rapid reaction of the control system. However, this first reaction is not sufficient, as the power required depends on other factors. The basic datum is modified by the N2 controller, which is a proportional controller , after comparing the difference between a datum; the nominal NR, and the measured N2. Thus the N2, and therefore the NR, are maintained constant without static droop.
CONTROL SYSTEM. INDICATION AND MONITORING (1) The system ensures the indication of engine parameters, performance indication, cycle counting, rating exceedance time counting, fault indication and maintenance aid. Engine parameter indication Indication of N 1, N2, TGT, Torque is provided direct from the engine to the cockpit, to allow engine monitoring in the event of total electronic failure and to check that the DECU is maintaining the engine within limits. These indications are independent of the electronic control. ΔN1 indication The system outputs the ΔN1 to the cockpit indicator. Counting functions The DECU counts and records in memory ,the N 1 and N2 cycles, the engine hours run. The DECU is also provided with a creep damage counter. This information can be accessed through the RS 232 serial data link.