Download
1 / 35

E N D
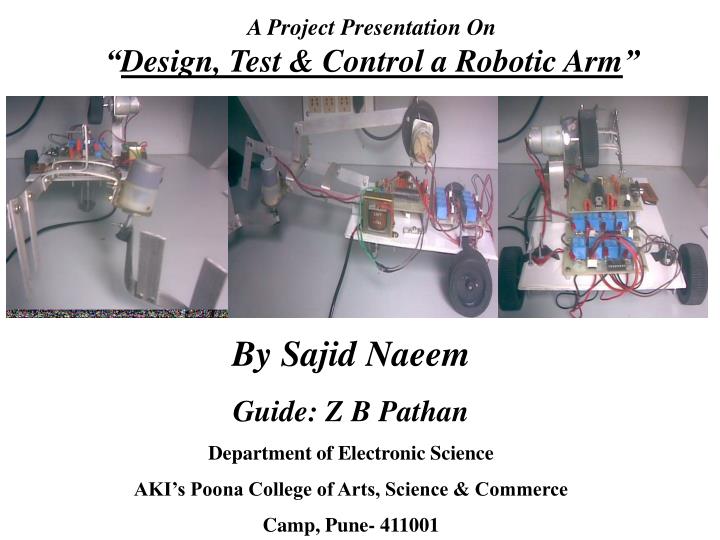
A Project Presentation On“Design, Test & Control a Robotic Arm” By Sajid Naeem Guide: Z B Pathan Department of Electronic Science AKI’s Poona College of Arts, Science & Commerce Camp, Pune- 411001
Basics of Mechatronics • Study of Electrical motors & Types • Design & Development of Robotic Arm • Features & application • Acknowledgment & References An Overview of Presentation
Mechatronics Fig: Mechatronics System
Electrical motor • “An actuator which converts electrical signal into rotation”.
Types of motors • AC Motor • DC Motor • Stepper Motor • Servo Motor
Types of Relay • Reed Relay • Latching Relay • Polarized Relay • Machine Tool Relay
Block diagram: Robotic Arm Fig: Block diagram of Robotic Arm
Hardware • PC • Target Board of microcontroller • Motor driver circuit board • RS232 Cable • Power Supply • Mechanical Assembly of Robotic Arm
Software • Kiel51 Compiler • Proteus 6.9 Simulator • Mc-Flash Programmer • Flash Magic Programmer • Express PCB • Delay Calculator
PCB Design Fig1: Component layer of Target board PCB
START INITIALIZATION: UP & RELEASE DOWN HOLD UP LEFT DOWN RELEASE UP LEFT STOP
FORWARD: SETB P1.0 CLR P1.1 SETB P1.2 CLR P1.3 RET BACKWARD: CLR P1.0 SETB P1.1 CLR P1.2 SETB P1.3 RET RIGHT: SETB P1.0 CLR P1.1 CLR P1.2 SETB P1.3 RET LEFT: CLR P1.0 SETB P1.1 SETB P1.2 CLR P1.3 RET UP: SETB P1.5 CLR P1.4 LCALL DELAY LCALL STOP LCALL DELAY_STOP RET DOWN: CLR P1.5 SETB P1.4 LCALL DELAY LCALL STOP LCALL DELAY_STOP RET org 0000h main: lcall down lcall hold lcall up lcall LEFT lcall delay lcall stop lcall down lcall release lcall up lcall RIGHT lcall delay lcall stop jmp $
HOLD: SETB P1.6 CLR P1.7 LCALL DELAY_1_SEC LCALL STOP LCALL DELAY_STOP RET STOP: MOV P1,#0 LCALL DELAY_STOP RET DELAY_STOP: MOV R5, # 72 MOV R6, # 180 MOV R7, # 1 DLOOP1: DJNZ R5, DLOOP1 DJNZ R6, DLOOP1 DJNZ R7, DLOOP1 RET UP: SETB P1.5 CLR P1.4 LCALL DELAY_1_SEC LCALL STOP LCALL DELAY_STOP RET DOWN: CLR P1.5 SETB P1.4 LCALL DELAY LCALL STOP LCALL DELAY_STOP RET RELEASE: CLR P1.6 SETB P1.7 LCALL DELAY_1_SEC LCALL STOP RET DELAY: MOV R5, # 244 MOV R6, # 1 MOV R7, # 8 DLOOP: DJNZ R5, DLOOP DJNZ R6, DLOOP DJNZ R7, DLOOP RET RET END
Mechanical Assembly Fig: Base with robotic arm part
Features • The robot arm has two degree of freedom • It has two type of motion • It is controlled by microcontroller P89C51RD2 • It consist of DC motor to control its speed • It can carry weight up to 500gm • It has ISP (in system programming) to modify or to change program on board • It has ULN2004 current driver
Applications • Pick and place • Loading and unloading • Inserting pin into hole • Automated loading • Industrial carrier robot • Welding • Molding
Acknowledgement We have great pleasure in presenting this project report on “Design & Test of Robotic”. We express our sincere thanks and gratitude to our project guide Prof. Z B Pathan (HOD), Prof M Rizwan, Prof Priya Frances and Prof S Waseem for their valuable guidance and providing us with necessary help whenever required by us throughout our project work. They helped us to have deeper insight in the concept of project and related areas.
Finally we extend our thanks to Principal Shaikh Anwar and Vice Principal Prof. G M Naziruddin for providing necessary facilities in the department for the compilation of this project work. • SAJID NAEEM • FARIHA GAIBI
References • BOOKS: 1.The 8051 microcontroller & Embedded System ( Mazidi , Pearson Education ,III edition) 2.Mechatronics Principle and Applications (Godfrey Onwobolu, Pearson Education) 3.Embedded System ( Rajkamal, Pearson Education, II edition) 4. .Introduction to Robotics (Vikram Kapila, Pearson Education,IV Edition)
Website: • http://mechatronics.poly.edu • http://www.roboticswikipedia.com • http://www.mecatronicswikipedia.com • http://www.datasheets.com • http://www.J2RScientific.com • http://www.expresspcb.com • http://www.kiel51.com • http://www.8051microcontroller.com