Download
1 / 46
510 likes | 1.3k Views
Obiekty sterowania i ich identyfikacja. Rodzaje wielkości związanych z charakterystykami obiektu/systemu sterowanego. Przykłady obiektów sterowania (omówienie). Obiekty o parametrach skupionych. - Modele we-wy, modele przestrzeni stanu .

E N D
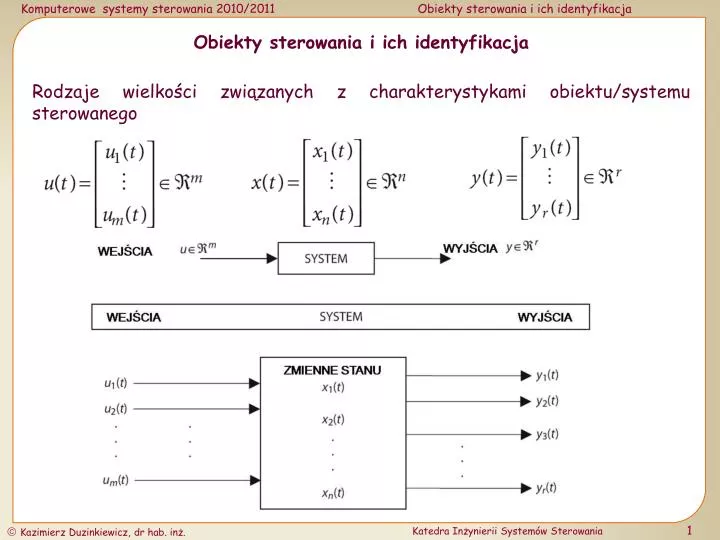
Obiekty sterowania i ich identyfikacja Rodzaje wielkości związanych z charakterystykami obiektu/systemu sterowanego
Przykłady obiektów sterowania (omówienie) Obiekty o parametrach skupionych - Modele we-wy, modele przestrzeni stanu obiekty jednowymiarowe – 1 wejście, 1 wyjście; zmienne stanu – 1 zmienna stanu, więcej niż 1 zmienna stanu obiekty wielowymiarowe – wiele wejść, wiele wyjść; zmienne stanu – wiele zmiennych stanu Obiekty o parametrach rozłożonych Obiekty o strukturze rozproszonej, w obiekty sieciowe
Rozwój teorii sterowania i systemów (metody oparte na modelach) Sterowanie klasyczne Metody w dziedzinie czasu i częstotliwości; stabilność z zapasem wzmocnienie i fazy Szczególnie użyteczne dla systemów jednowymiarowych (SISO) Ciągle jedno z głównych narzędzi inżynierów automatyków Nowoczesne sterowanie Podejście przestrzeni stanu do liniowych systemów sterowania Użyteczne zarówno dla systemów SISO jak i wielowymiarowych (MIMO) Optymalne sterowanie Znajduje sterowanie, które minimalizuje pewną funkcję celu (np. zużycie paliwa, czas, … Może być stosowane zarówno do sterowania w układzie otwartym jak i zamkniętym Krzepkie sterowanie Zapewnia stabilność przy istnieniu niepewności Sterowanie nieliniowe, sterowanie adaptacyjne, sterowanie predykcyjne, sterowanie hybrydowe
Dwa oblicza teorii i inżynierii sterowania: Teoria systemów i sterowania rozwija się dynamicznie w ostatnich dziesięcioleciach - Podejście przestrzeni stanów i filtr Kalmana są produktami tego rozwoju lat 60. ubiegłego stulecia, które umożliwiły po raz pierwszy rozwiązywać problemy sterowania wielowymiarowych liniowych problemów sterowania - Od lat 70. rozwija się teoria i techniki sterowania adaptacyjnego - W latach 80. zostało rozwinięte sterowanie krzepkie dla systemów wielowymiarowych - W tym samym czasie rozwinięte zostały techniki detekcji i diagnostyki Nowe techniki są bardzo obiecujące dla zastosowań przemysłowych i przyciągały zawsze zainteresowanie akademickich ośrodków badawczych Zastosowanie tych technik w przemyśle procesowym było ograniczone
Odwiedzając zakłady przemysłu procesowego możemy stwierdzić, że nowoczesne komputerowe systemy sterowania są kombinacją: - najnowszej technologii komputerowej - klasycznej technologii sterowania PID, która jest technologią ograniczoną głównie do układów jednowymiarowych, rozwiniętą w latach 1940 i 1950 Przyczyny dwoistości sytuacji (m.in.) Brak odpowiednich modeli dynamiki procesów przemysłowych – wszystkie zaawansowane nowoczesne techniki są oparte na modelach i potrzebują dokładnych w racjonalnym stopniu modeli procesów brak dobrej komunikacji pomiędzy ośrodkami akademickimi a przemysłem (rola absolwentów z wykształceniem w zakresie inżynierii sterowania !!!)
Wyjątek W latach 90. ubiegłego stulecia sterowanie predykcyjne (Model PredictiveControl – MPC) uzyskało silną pozycję w przemyśle rafineryjnym i petrochemicznym i zaczęło przyciągać uwagę innych przemysłów - Tysiące raportów przestawia zastosowania przemysłowe MPC, głównie z liniowymi modelami dynamicznymi - Koszt zastosowania MPC jest ciągle wysoki - Istnieje obecnie przekonanie, że modelowanie i identyfikacja procesów jest najtrudniejszą i najbardziej czasochłonną częścią projektów MPC Szerokie upowszechnienie zastosowań MPC wymaga bardziej efektywnych technologii identyfikacji (w oparciu o: YucaiZhu (2001). Multivariable System Identification for ProcessControl)
Obraz zastosowania klasycznej technologii PID Sterowniki PI oraz PID znajdują się w centrum praktyki inżynierii sterowania od siedemdziesięciu lat Pomimo tego nie znajdowały przez wiele lat odpowiedniego zainteresowania ośrodków akademickich; przełomem stały się prace - Åström, K.J., Hägglind, T. (1995). PID Controllers: Theory, Design and Tunning - Shinskey, F.G. (1988, 1996). ProcessControl Systems – Application, Design and Tunning Istnieją silne dowody, że sterowniki PI i PID pozostają słabo rozumiane, a w szczególności niewłaściwie strojone w wielu zastosowaniach (w oparciu o: O’Dwyer, A. YucaiZhu (2006). Handbook of PI and PID ControllerTunningRules)
Fakty o technologii sterowania PID: Prawdopodobnie jedynie w 5-10% przemysłowych układów sterowania nie mogą być zastosowane jednowymiarowe sterowniki PID Sterowniki te sprawdzają się dobrze dla procesów z „łagodną” dynamiką i umiarkowanymi wymaganiami jakości – istnieją dane, że: 98% pętli sterowania i przemyśle papierniczym wykorzystuje sterowniki SISO PI (Bialkowski, W,L. (1996). inTheControlHandbook, Ed. W.S. Levine); ponad 95% zastosowań sterowania procesami wykorzystuje sterowniki PID (Åström, K.J., Hägglind, T. (1995). PID Controllers: Theory, Design and Tunning) Stosowanie sterowników PI oraz PID jest rekomendowane dla procesów niskiego i średniego rzędu i z niedużymi opóźnieniami (Isermann, R. (1989). Digital Control Systems)
Dowody, że sterowniki PI i PID pozostają słabo rozumiane: Testowanie ponad tysiąca pętli sterowania w ponad stu zakładach pokazało, że: ponad 30% zainstalowanych sterowników pracuje w trybie sterowania ręcznego a 65% pętli pracujących w trybie sterowania automatycznego posiada gorsze parametry jakościowe niż te pracujące w trybie ręcznego sterowania (Ender, D.B. (1993). Processcontrolperformamnce: not as good as youthink, Control Engineering) 80% sterowników jest niewłaściwie nastrojonych; 30% pracuje w trybie sterowania ręcznego; 25% wszystkich sterowników PID pracuje wykorzystując domyślne nastawy fabryczne, co sugeruje, że nie były w ogóle strojone (Van Overschee, P. and De Moor, B. (2000). RaPID: theend of heuristic PID tunning. Preprints of Proceedings of PID’00: IFAC Workshop on digitalcontrol)
Dla zaprojektowania i nastrojenie dobrego sterowania/sterownika należy: Określić wymagane wskaźniki jakości i krzepkości dla pętli sterowania Poznać model dynamiki sterowanego systemu/obiektu Posiadać odpowiednią metodę projektowania sterownika zapewniającą osiągnięcie wymaganych wskaźników jakości i krzepkości dla posiadanego modelu dynamiki Wdrożyć zaprojektowany sterownik biorąc pod uwagę praktyczne ograniczenia Przetestować jakość działania regulatora na obiekcie lub modelu referencyjnym i jeżeli potrzeba przeprojektować/przestroić
Przedstawienie graficzne zasad projektowania i testowania sterownika:
Identyfikacja systemów niezłożonych Systemy niezłożone: - dynamika pierwszego lub drugiego rzędu - brak zer Podczas zajęć laboratoryjnych identyfikacja obiektów: - pierwszego i drugiego rzędu obiekty RLC (patrz: MiPI, SD) - obiekt cieplny
Przykładowy obiekt cieplny – proces ogrzewania pomieszczenia: Problem sterowania: dostosować dostarczane ciepło Q tak, aby utrzymać stałą temperaturę w pomieszczeniu T. Temperatura zewnętrzna jest głównym zakłóceniem Model z praw zachowania Zmiana energii cieplnej pomieszczenia jest równa strumieniowi energii cieplnej netto dostarczanej do pomieszczenia To [K] – temperatura otoczenia, T[K] – temperatura w pomieszczeniu, CV [J/K] – pojemność cieplna pomieszczenia, Q[J] – ciepło dostarczane ze źródła ciepła, α(To – T) – utrata ciepła wskutek wymiany powietrza i przewodnictwa cieplnego ścian
Dwa etapy identyfikacji systemu: - dobór struktury modelu np. transmitancja z określonym stopniem licznika i mianownika - oszacowanie wartości parametrów Pamiętamy, że odpowiedź systemu zależy od: - zastosowanego wymuszenia - narzuconych warunków początkowych Stosowane wymuszenia indentyfikacyjne: - wymuszenie stałe (test statyczny) - wymuszenie skokowe - wymuszenie impulsowe - wymuszenie sinusoidalne - wymuszenie przypadkowe – zwykle pseudo – przypadkowa sekwencja binarna - wymuszenie występujące w normalnym działaniu systemu
Test statyczny: Cele: 1. Identyfikacja elementów całkujących w dynamice obiektu (ewentualnie niestabilności obiektu) 2. Określenie/identyfikacja charakterystyki statycznej obiektu Realizacja: 1. Podanie na wejście sygnału stałego 2. Zmiana sygnału wejściowego w pełnym zakresie jego zmian Charakterystyka statyczna z histerezą Charakterystyka statyczna nieliniowa Charakterystyka statyczna liniowa
Przypomnienia – modele dynamiki Modele deterministyczne Ogólna postać opisu typu wejście – wyjście, równaniem różniczkowym liniowego systemu dynamicznego bez opóźnienia lub (1) gdzie
Dla obiektów z opóźnieniem modele te przyjmują postać oraz (2) Celem identyfikacji jest oszacowanie/estymacja współczynników wielomianów A oraz B dla danych stopni n oraz m równań (1) lub (2)
Dyskretna aproksymacja tych modeli prowadzi do modeli różnicowych, dla obiektów bez opóźnienia postaci lub (3) gdzie dla obiektów z opóźnieniem lub (4)
Celem identyfikacji jest oszacowanie/estymacja współczynników wielomianów A oraz B dla danych stopni n oraz m równań (3) lub (4)
Identyfikacja z odpowiedzi skokowej Cel: Pozyskanie podstawowej wiedzy o dynamice obiektu i wstępne oszacowanie wartości parametrów charakteryzujących dynamikę obiektu Metody bazujące na odpowiedzi skokowej należą do grupy metod deterministycznych (nie uwzględniane są źródła sygnałów przypadkowych) Zastosowanie tych metod powinno dostarczyć informacji o wzmocnieniu obiektu, jego dominujących stałych czasowych i czasach opóźnień Podczas eksperymentu identyfikacyjnego, w przypadku obiektów wielowymiarowych, zmieniana jest skokowo wartość jednej wielkości wejściowej a pozostałe utrzymywane są na stałej wartości
Pomierzona odpowiedź obiektu jest odpowiedzią na rzeczywisty skok sygnału wejściowego – należy zadbać o to, aby badany proces znajdował się w stanie ustalonym przed skokową zmianą sygnału wejściowego Aby uzyskać odpowiedź na skok jednostkowy należy uzyskaną odpowiedź znormalizować Ponieważ identyfikowany proces może być w ogólności nieliniowy, warto zarejestrować kilka odpowiedzi skokowych dla różnych amplitud skoku i różnych jego znaków W celu normalizacji można posłużyć się następującą formułą gdzie, - i-ty punkt odpowiedzi skokowej - k-ty pomiar, - amplituda skoku w k-tym pomiarze, - wartość odpowiedzi w k-tym pomiarze w i-tym punkcie, - wartość odpowiedzi finalna w i-tym punkcie
Wymuszenie skokowe: Obiekt pierwszego rzędu - inercyjny Równanie różniczkowe: Transmitancja: Element charakteryzowany dwoma parametrami: Identyfikacja parametrów z charakterystyki skokowej
Czynności eksperymentu identyfikacyjnego: 1. Obiekt powinien znajdować się w stanie ustalonym. Sprawdzamy, czy warunek ten jest spełniony przed rozpoczęciem eksperymentu 2. Niech wówczas
3. Znajdź wzmocnienie statyczne obiektu Kp 4. Znajdź stałą czasową bezwładności Tb a. Metoda przyrostów procentowych
Przykład: a = 1 Amplituda wyjścia Czas [s] K = 2, Tb = 0.2[s]
Wymuszenie skokowe: Obiekt drugiego rzędu – oscyjacyjny Równanie różniczkowe: Transmitancja: Element charakteryzowany trzema parametrami:
Czynności eksperymentu identyfikacyjnego: 1. Obiekt powinien znajdować się w stanie ustalonym. Sprawdzamy, czy warunek ten jest spełniony przed rozpoczęciem eksperymentu 2. Niech wówczas
3. Znajdź wzmocnienie statyczne obiektu Kp 4. Znajdź okres i pulsację drgań tłumionych T, ω
5. Znajdź współczynnik tłumienia ξ a. Metoda logarytmicznego dekrementu Rozwiązać ze względu na współczynnik tłumienia ξ
b. Procentowego przeregulowania stąd Rozwiązać ze względu na współczynnik tłumienia ξ
Identyfikacja parametrów z charakterystyki skokowej - podsumowanie
Inne obiekty Wymuszenie skokowe: Obiekt pierwszego rzędu – całkujący idealny Równanie różniczkowe: Transmitancja: Element charakteryzowany jednym parametrem: Identyfikacja parametrów z charakterystyki skokowej
Przykład: a = 1 Amplituda wyjścia Czas [s] Ti = 1[s]
Wymuszenie skokowe: Obiekt pierwszego rzędu – całkujący rzeczywisty Równanie różniczkowe: Transmitancja: Element charakteryzowany dwoma parametrami: Identyfikacja parametrów z charakterystyki skokowej
Przykład: a = 1 Amplituda wyjścia 0.4 Czas [s] Tb = 0.2[s], Ti = 0.5[s]
Wymuszenie skokowe: Obiekt pierwszego rzędu z opóźnieniem Równanie różniczkowe: Transmitancja: Element charakteryzowany trzema parametrami: Identyfikacja parametrów z charakterystyki skokowej
Znając dwa punkty odpowiedzi skokowej jednostkowej możemy policzyć:
Wymuszenie skokowe: Obiekt drugiego i wyższego rzędu – inercyjny Równanie różniczkowe: Transmitancja: Element charakteryzowany trzema parametrami: Identyfikacja parametrów z charakterystyki skokowej - stałych czasowych bezwładności z charakterystyki skokowej określić nie można
Obiekty wieloinercyjne o różnych stałych czasowych, identyfikacja z odpowiedzi skokowej - możliwa aproksymacja • modelem inercji pierwszego rzędu z opóźnieniem, • modelem wieloinercyjnym o tej samej stałej czasowej i z opóźnieniem, • Metoda Strejca • - modelem wieloinercyjnym o tej różnych stałych czasowych pozostających ze sobą w stosunku wielokrotności i z opóźnieniem, • Metoda Broida