Download

1 / 24
240 likes | 400 Views
Further Results of Soft-Inplane Tiltrotor Aeromechanics Investigation Using Two Multibody Analyses. Pierangelo Masarati Assistant Professor Dipartimento di Ingegneria Aerospaziale Politecnico di Milano (Italy). AHS International 60th Annual Forum & Technology Display

E N D
Further Resultsof Soft-Inplane Tiltrotor Aeromechanics Investigation Using Two Multibody Analyses Pierangelo Masarati Assistant Professor Dipartimento di Ingegneria Aerospaziale Politecnico di Milano (Italy) AHS International 60th Annual Forum & Technology Display Baltimore, MD - Inner Harbor June 7-10, 2004
Authors and Contributors • David J. PiatakNASA Langley Research Center • Jeffrey D. SingletonArmy Research Laboratory • Giuseppe QuarantaPolitecnico di Milano
Outline • Objectives and Approach • Experimental Model Description • Multibody Dynamics Analyses • Key Analytical Results • Isolated Blade & Hub Results • Control System Couplings • Hover Performance & Stability • Forward Flight Stability • Selected Nonlinear Analysis Issues • Concluding Remarks
Objectives • Compare multibody analytical techniques • Develop fundamental understanding of strengths, weaknesses, and capabilities of two different codes • Assess prediction capabilities • Compare response, loads, and aeroelastic stability in hover & forward flight. • Analysis vs. analysis • Analysis vs. experiment • Assess code/user fidelity • Two different multibody codes • Two different researchers • Contrasting two codes helps eliminate errors in modeling
Experimental Model Wing & Rotor Aeroelastic Test System (WRATS)Tested in the Rotorcraft Hover Test Facility and the Transonic Dynamics Tunnel at NASA Langley Research Center Semi-Articulated Soft-Inplane Hub (SASIP) • 4 blades • articulated • soft-inplane • elastomeric lag damper
MultibodyAnalyses • Time domain - analyze via virtual experiments • Can model components and mechanical effects not typically included with comprehensive rotor analyses • Hydraulic components • Mechanical joints • Free-play in linkages • No fixed-hub assumption
Analytical Models & Analysts • MBDyn - MultiBody Dynamics • Developed by (a team led by)Prof. Paolo Mantegazza, Politecnico di Milano • WRATS-SASIP analyzed by Pierangelo Masaratiand Giuseppe Quaranta • DYMORE • Developed by (a team led by)Prof. Olivier Bauchau, Georgia Tech • WRATS-SASIP analyzed by Dave Piatak and Jinwei Shen
ConventionalWRATS Model MBDyn - Analytical Model • Analysis includes: • Swashplate mechanics • Hydraulic actuators • Blades as composite-ready beams, with blade element aerodynamics • Wing as modal element, with state-space aerodynamics
Blade Model • 4 element FEM • Lifting line • 3D inflow model • Highly twisted: 34 degrees from root to tip • Structural and geometrical properties tuned to match WRATS SASIP ground vibration test results DYMORE - Analytical Model
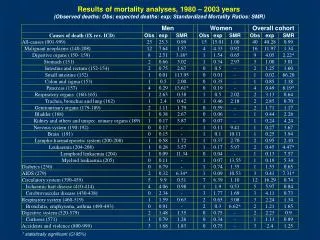
All analyses consistent • Results agree with experiment Mode Measured UMARC MBDyn DYMORE F1 - 0.76 0.67 0.69 L1 6.46 6.43 6.32 6.46 F2 21.7 20.01 19.37 18.51 F3 61.15 64.20 62.43 61.45 T1 107.94 103.50 106.58 108.49 Blade Modal Analysis
Control System Couplings • Typically difficult to model. Elastic deformation can have a significant contribution. • Non-linear modeling - classical analyses typically use constant or tabulated lookup coefficients. • Multibody codes capture nonlinear effect.
Hover Run-up • Current analytical model is a simple, constant stiffness equivalent spring hinge
HoverPerformance • Blade elasticity and geometrical cross-couplings greatly influence performance predictions
Transient time-series correlate with frequency analysis Linear wind-up Hover Dynamics
Comparison of generic soft-stiff inplane wing mode damping, Windmilling configuration Forward Flight Stability
Comparison of generic soft-stiff inplane wing mode damping in powered and windmill. Windmilling case correlates well. Initial results for powered mode did not (no drive system dynamics) Forward Flight Stability
Experimental evidence of high damping in wing beam mode in powered flight, with low damping bucket around zero torque • High damping found in coupling with drive train dynamics • Possible bucket explanation found by considering deadband in drive train Powered Flight Damping Bucket
Stiff-inplane experimental results have generally show only small differences in wing damping between powered and wind-milling flight mode. • Soft-inplane experimental results have significant differences. • Reason is ‘chance’ coupling of drive dynamics with wing: Powered Flight Damping Bucket
Deadband yields windmill-like damping • Soft mast slope controls bucket width Powered Flight Damping Bucket
Damping peaks at bucket borders may be explained with identification close to deadband transition Powered Flight Damping Bucket
Concluding Remarks • Multibody codes can: • successfully model complex systems • improve predictions of rotorcraft dynamic behavior • proficiently address nonlinearity issues • Next steps are: • Conversion / maneuver simulations • Hub/blade maneuver loads correlation • Parametric study of SASIP
Special Thanks To - • Giampiero Bindolino(Politecnico di Milano, Dipartimento di Ingegneria Aerospaziale) • Mark W. Nixon(ARL: Army Research Laboratory, Vehicle Technology Directorate) • Jinwei Shen(NIA: National Institute of Aerospace)