Download
1 / 11
110 likes | 262 Views
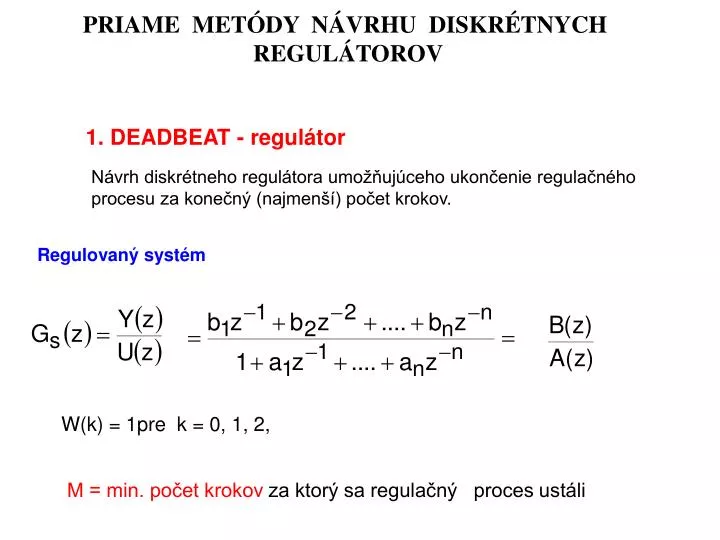
PRIAME MET ÓDY NÁVRHU DISKRÉTNYCH REGULÁTOROV. 1. DEADBEAT - regulátor. Návrh diskrétneho regulátora umožňujúceho ukončenie regulačného procesu za konečný (najmenší) počet krokov. Regulovaný systém. W(k) = 1pre k = 0, 1, 2,. M = min. počet krokov za ktorý sa regulačný proces ustáli.

E N D
PRIAME METÓDY NÁVRHU DISKRÉTNYCH REGULÁTOROV 1. DEADBEAT - regulátor Návrh diskrétneho regulátora umožňujúceho ukončenie regulačného procesu za konečný (najmenší) počet krokov. Regulovaný systém W(k) = 1pre k = 0, 1, 2, M = min. počet krokov za ktorý sa regulačný proces ustáli
Podmienky ukončenia regulačného procesu za M krokov Obrazy W,U,Y
Delením získame: Kde p1 = y(1) p2 = y(2)-y(1) ..................... pM = 1-y(M-1) Deľme ešte polynómy : Kde q0 = u(0) q1 = u(1)-u(0) ..................... qM = u(M)-u(M-1)
platí, že K – zosilnenie regulovaného systému Gs(s) Tiež platí : odkiaľ Z podielu [ Y(z) / W(z) ] / [ U(z) / W(z) ] je P(z) Q(z)
Dosadíme za GR a GWY Porovnajme vzťahy pre G(z) : Odkiaľ bezprostredne vyplýva : M = n – rád systému !!!
q1 = a1q0 q2 = a2q0 ............... qm = amq0 p1 = b1q0 p2 = b2q0 ............... pm = bmq0 Zo sumy p1+....+pm = 1 = (b1+b2+....+bm)q0
Poznámka : Pretože bi = bi (T) a pre T -> 0 aj bi -> 0, tým aj Dôsledkom toho preto nie je možné T ľubovoľne zmenšovať.
Akčný zásah : Dosadením pi = biq0 a qi = aiq0 do GR(z) získame teda GR(z) kompenzuje menovateľ G(z).
Súhrn : 1. Deadbeat regulátor -> n krokov regulácie. 2. Je vhodný pre asymptoticky stabilné syst., lebo kompenzuje A(z) 3. Doba regulácie treg = MT = nT, T – perióda vzorkovania. So zmenšovaním sa T klesá treg , ale narastá u(0) , lebo suma ( bi ) sa zmenšuje klesním T. 4. Periódu T musíme voliť “dostatočne veľkú” ,aby nebolo u(0) > umax kde umax je prípustná maximálna hodnota u(k). 5. Hodnotu u(0) môžeme znížiť aj algoritmickým zvýšením počtu krokov regulácie nad M = n 6. Diskrétne regulátory spravidla majú vysokú parametrickú citlivosť (t.j. malú robustnosť), čo je ich nevýhodou.
Príklad : K spojitému systému navrhnite deadbeat regulátor ! Riešenie M = n = 2
q1 = a1q0 = -3,917694 q2 = a2q0 = 0,897113 p1 = b1q0 = 0,622459 p2 = b2q0 = 0,377540