Download
1 / 1
20 likes | 177 Views
Improving a Plan Library for Real-time Systems Using Nearly Orthogonal Latin Hypercube Sampling. Robert H. Holder, III University of Maryland Baltimore County Johns Hopkins University Applied Physics Laboratory. Motivation: Mobile Sensor Allocation. Approach. …we can create a contingency

E N D
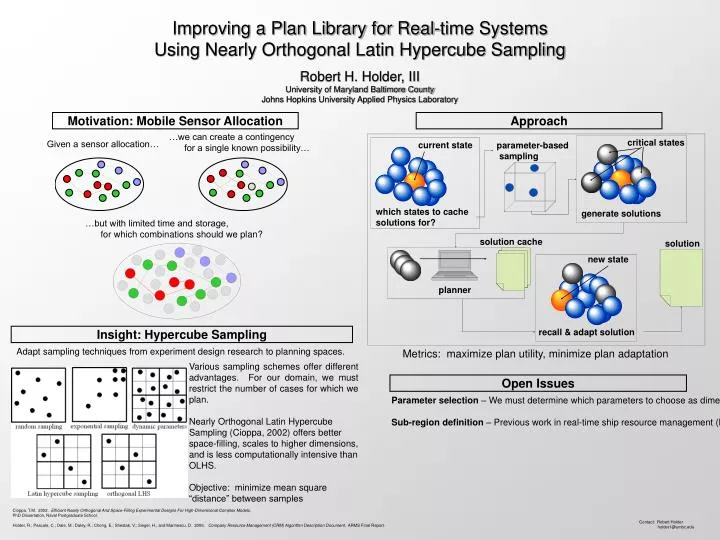
Improving a Plan Library for Real-time Systems Using Nearly Orthogonal Latin Hypercube Sampling Robert H. Holder, III University of Maryland Baltimore County Johns Hopkins University Applied Physics Laboratory Motivation: Mobile Sensor Allocation Approach …we can create a contingency for a single known possibility… critical states current state parameter-based sampling Given a sensor allocation… which states to cache solutions for? generate solutions …but with limited time and storage, for which combinations should we plan? solution cache solution new state planner recall & adapt solution Insight: Hypercube Sampling Adapt sampling techniques from experiment design research to planning spaces. Metrics: maximize plan utility, minimize plan adaptation Various sampling schemes offer different advantages. For our domain, we must restrict the number of cases for which we plan. Nearly Orthogonal Latin Hypercube Sampling (Cioppa, 2002) offers better space-filling, scales to higher dimensions, and is less computationally intensive than OLHS. Objective: minimize mean square “distance” between samples Open Issues Parameter selection – We must determine which parameters to choose as dimensions of the planning space. Some parameters will be chosen from the set of inputs to the planner; other parameters will be derived from information about the environment that indirectly affect the plan solution. Sub-region definition – Previous work in real-time ship resource management (Holder et. al., 2006) suggests that strategic biasing during sampling can result in improved performance over a uniform sampling scheme. Application of NOLHS to appropriately defined sub-regions will allow us to emphasize regions of interest. Cioppa, T.M. 2002. Efficient Nearly Orthogonal And Space-Filling Experimental Designs For High-Dimensional Complex Models.PhD Dissertation, Naval Postgraduate School. Holder, R.; Pascale, C.; Dale, M.; Daley, R.; Chong, E.; Shestak, V.; Siegel, H.; and Marinescu, D. 2006. Company Resource Management (CRM) Algorithm Description Document. ARMS Final Report. Contact: Robert Holder holder1@umbc.edu