Download
1 / 17
220 likes | 651 Views
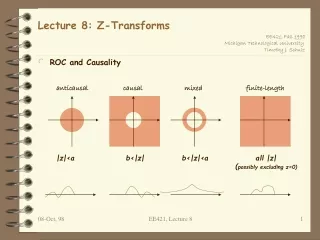
Recap on Z-Transforms How to do Z-Transforms How to do inverse Z-Transforms How to infer properties of a signal from its Z-transform Transfer Functions How to obtain Transfer Functions How to infer properties of a system from its Transfer Function. Ting Yan @U of Virginia. Filter

E N D
Recap on Z-Transforms • How to do Z-Transforms • How to do inverse Z-Transforms • How to infer properties of a signal from its Z-transform • Transfer Functions • How to obtain Transfer Functions • How to infer properties of a system from its Transfer Function Ting Yan @U of Virginia
Filter Y[n]=1/2x[n]+1/2y[n-1] raw readings from a noisy temperature sensor - Input Signal smooth temperature values after filtering - Output Signal
Z-Transform of a Signal not a Filter Z X[n] X(z) Z-1 x(0) x(1) x(2) x(3) x(4) … 2 -1 3 7 -5 … x(0) · z0 +x(1) · z-1 +x(2) · z-2 +x(3) · z-3 +x(4) · z-4 … 2· z0 -1 · z-1 3 · z-2 7 · z-3 -5· z-4 … ∞ X(Z)=Σ x(k) . Z-k k=0
Z Transform of Unit Impulse Signal (z) Z (k) (z) Z-1 (0) = 1 (1) = 0 (2) = 0 (3) = 0 (4) = 0 … 1 · z0 +0 · z-1 +0 · z-2 +0 · z-3 +0 · z-4 … (z)=1
Z-Transform of Unit Step Signal Z ustep(k) Ustep(z) Z-1 u(0) = 1 u(1) = 1 u(2) = 1 u(3) = 1 u(4) = 1 … 1 · z0 +1 · z-1 +1 · z-2 +1 · z-3 +1 · z-4 …
A little bit more math … assuming Unit Step Signal - continued
Z-Transform of Exponential Signal Z uexp(k) Uexp(z) Z-1 u(0) = 1 u(1) = a u(2) = a2 u(3) = a3 u(4) = a4 … 1 · z0 +a · z-1 +a2 · z-2 +a3 · z-3 +a4 · z-4 … Remember this! This result is from last slide where a->az-1
Z Z Z Z-1 Z-1 Z-1 Important Theorem : Convolution in time doamin is the same as simple multiplication in z- domain Time Domain = * (convolution) u(k) v(k) y(k) = · (multiplication) U(z) V(z) Y(z) Z Domain
Z Z Z-1 Z-Transform/Inverse Z-TransformConvolution in time is parallel to multiply in Z domain yimpuse(k)=0.3k-1 u(k)=0.7k y(k)? = * (convolution) Transfer Function · (multiplication) =
Z Z Z z-1 Delay the Unit Step Signal (k-1) u(k) y(k) = ustep (k) (k-1) * (convolution) u(k-1) convolution Transfer Function · (multiplication) =
Delayed Unit Step Signal – Cont’d Z u(k-1) Udstep(z) Z-1 u(0) = 0 u(1) = 1 u(2) = 1 u(3) = 1 u(4) = 1 … 0 · z0 +1 · z-1 +1 · z-2 +1 · z-3 +1 · z-4 … Remember this!
Transfer Function • Transfer function provides a much more intuitive way to understand the input-output relationship, or system characteristics of an LTI system • Stability • Accuracy • Settling time • Overshoot • …
properties of Z-Transform • Linearity means scaling and superposition Z-Transform Time Domain Y(z)=aU(z) y(k)=au(k) Scaling Y(z)=U(z)+V(z) y(k)=u(k)+v(k) Superposition
Use Exponential to get Trigonometric function’s z transform ? Z[cos(kθ)]? Z[sin(kθ)]? Euler Formula:
Z-Transform of sin/cos Z-Transform Time Domain
Exponentially Modulated sin/cos A damped oscillating signal – a typical output of a second order system