Download
1 / 51
510 likes | 650 Views
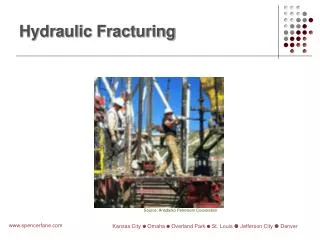
Hydraulic Nanomanipulator. P13371. Table of Contents & Agenda. Introductions. Customer Dr. Schrlau Team Jacob Bertani Bridget Lally Avash Joshi Nick Matson Keith Slusser Guide Bill Nowak. What Is a Nanomanipulator ?. Ultra-high precision positioning instrument

E N D
Hydraulic Nanomanipulator P13371
Introductions • Customer Dr. Schrlau • Team Jacob Bertani Bridget Lally Avash Joshi Nick Matson Keith Slusser • Guide Bill Nowak
What Is a Nanomanipulator? • Ultra-high precision positioning instrument • Maneuver objects under high magnification, at the micro and nano scales • Primary customer uses: • Cell behavior for medical diagnostics
Project Objectives & Goals • Improve 12371 prototype and redesign where applicable • Improve overall nanomanipulator function to meet competitive operational specifications • Reduce price of nanomanipulator with respect to commercial devices • Broaden participation in nanoscience
Existing System (P12371) Controls Interface Subsystem
Existing System (P12371) Controls Subsystem
Existing System (P12371) Drive Subsystem
Existing System (P12371) Manipulator Subsystem
1st House of Quality Relationships: 9 = Strong 3 = Moderate 1 = Weak 0 = No Relationship
House of Quality Pareto Analysis • Top Specifications • Movement resolution • Position Repeatability • Manufacturing Cost • Joystick Control • Backlash reduction • If Top 8 of 16 Specs Met • 76% of customer needs satisfied
Existing System Evaluation (P12371) • Specs Unsatisfied • Backlash • Delay and rotation problems • Size • Weight • Specs Met • Resolution • Cost
Hydraulic Driver Concept Development Servo Motor Nano-precision actuator Stepper Motor Commercial Syringe
Stepper Motor • Current Driver • Already have working motors to test • Not the root cause of system performance issues • Easy to control • Evaluate existing motors and compare against other stepper motor options
Hydraulic Actuation Concept Development Piston Actuator • Fluid displaced through • the movement of a sealed ram
Hydraulic Actuation Concept Development Diaphragm Actuator • Pressure is transferred through the depression • of an immobile,flexible membrane seal
Future Hydraulic Actuation Plan • Both options are viable and will be evaluated in detailed design phase Diaphragm Seals Piston Seals
Manipulator Movement Concept Development • Ball Bearing Carriages • Sleeve Bearing Carriage • Low Profile Bearing Carriage • Friction Slider (current)
Sleeve Sliders • Pros • Reduced Friction • Reduced Vibration • Reduced Backlash • Cons • Cost
Retain Properties of Current System (P12371) • Resolution • 11 nm theoretical • 53 nm experimental • Cost • $1200 • Design Concept
Feasibility Analysis of Theoretical Resolution • Lead = 0.0125 in/rev = 0.3175 mm/rev • Microsteps/rev = 12,800 • 0.02185°/microstep
Issues to Improve in Current System (P12371) • Hydraulics • Backlash of 14 revolutions to change direction • Manipulator Mounting System • High friction causing backlash • Controls • Delay and rotation problems • Vibration in motor • Position un-repeatable • Machining Issues • Misalignment
Hydraulic System Issues • Air in lines • Fittings • Tubes
Air in Hydraulic Lines • Bulk modulus of water = 2,150 MPa • Bulk modulus of air = 0.142 Mpa • Assume: • Resulting Backlash • 15.75 Revolutions
Hydraulics Future Plan • Decrease tube diameter • Incorporate line bleeding valve • Replace barbed fittings Barbed Fitting Double Compression Fitting
Manipulator Mounting System Issues • Coefficient of Frictional of Slider too high • Misalignments
Feasibility Analysis of Sleeve Sliders • Total weight on bottom slider = 760 gms • Coefficient of Friction • Friction Slider = 1 • Sleeve Slider = 0.2 • Friction Slider = 8.2N • Sleeve Slider = 2.2N
Stepper Motor Issues • Controls • Un-fluid movement • Vibrations
Stepper Motor Control Future Plan • Evaluate Current System • Programming bugs • Different driver chip • Commercial control boards
Controls • Possible Design Changes • Different driver IC Chips • Improve board layout • Existing system • Functional • Low cost
Controls Future Plan • Evaluate existing code • Test existing microcontroller • Decide how to tackle live feed from camera
Preliminary Cost • Previous Manufacturing cost: $1,195.75 • Cost of suggested improvements: ~$300.00 • New sliders • Smaller diameter, thick walled tubing • New piston sleeves • Double compression fittings • Cost of items being removed: ~$110.00 • Estimated Manufacturing Cost: $1,400
Team Roles • Jacob Bertani– Lead Hydraulic Subsystem Engineer • Avash Joshi – Lead Driver / Hydraulic Interface Subsystem Engineer • Keith Slusser– Lead Manipulator Subsystem Engineer • Bridget Lally– Lead Controls Engineer • Nick Matson – Project Manager & Controls Engineer