Download
1 / 20
200 likes | 406 Views
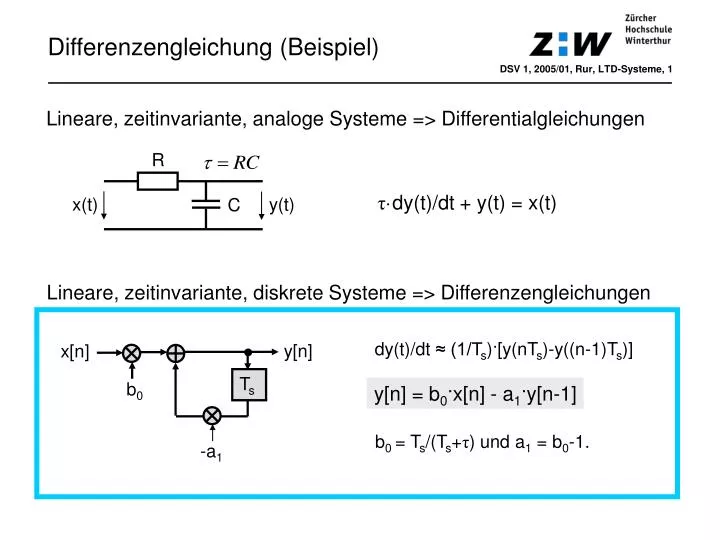
Differenzengleichung (Beispiel). DSV 1, 2005/01, Rur, LTD-Systeme, 1. Lineare, zeitinvariante, analoge Systeme => Differentialgleichungen. R. τ · dy(t)/dt + y(t) = x(t). x(t). y(t). C. Lineare, zeitinvariante, diskrete Systeme => Differenzengleichungen.

E N D
Differenzengleichung (Beispiel) DSV 1, 2005/01, Rur, LTD-Systeme, 1 Lineare, zeitinvariante, analoge Systeme => Differentialgleichungen R τ·dy(t)/dt + y(t) = x(t) x(t) y(t) C Lineare, zeitinvariante, diskrete Systeme => Differenzengleichungen dy(t)/dt ≈ (1/Ts)·[y(nTs)-y((n-1)Ts)] y[n] x[n] Ts b0 y[n] = b0·x[n] - a1·y[n-1] b0 = Ts/(Ts+τ) und a1 = b0-1. -a1
Differenzengleichung DSV 1, 2005/01, Rur, LTD-Systeme, 2 x[n-1] x[n-N] Ts Ts x[n] ... b0 bN-1 b1 bN y[n] ... -aM -aM-1 -a1 Ts Ts ... y[n-M] y[n-1] Nicht-rekursive Systeme (FIR-/Transversalfilter) Rekursive Systeme (IIR-Filter)
Impulsantwort und Faltungssumme DSV 1, 2005/01, Rur, LTD-Systeme, 3 δ[n] h[n] (Impulsantwort) LTD- System 1 n n Bestimmung der Ausgangsfolge y[n] für beliebige Eingangsfolgen x[n] x0[n] = x[0]·δ[n] => y0[n] = x[0]·h[n] xk[n] = x[k]·δ[n-k] => yk[n] = x[k]·h[n-k]
Faltung (Beispiel)Demo: dsv1kap4_digisys_faltungschritt.m DSV 1, 2005/01, Rur, LTD-Systeme, 4 Approximation RC-Tiefpass 1. Ordnung, RC=1s, fs=10 Hz: b0 = 0.0909 und a1 = -0.9091. y[10]
Faltung (Beispiel 2)Demo: dsv1kap4_digisys_faltung.m DSV 1, 2006/01, Hrt, LTD-Systeme, 5 RC-Tiefpass-Approximation: b0 = 0.2 und a1 = -0.8 Signal: Sägezahnimpuls Bevor ein Signal x eintrifft (n < 0) ist der Ausgang y = 0 (kausales System). Ausgangssignal y = Faltung der Impulsantwort h mit den eingetroffenen Signalen x. Faltung = Signale spiegeln, mit Impulsantwort multiplizieren, Terme aufaddieren.
Frequenzgang eines LTD-Systems DSV 1, 2005/01, Rur, Filterentwurf, 6 H(z): Übertragungsfunktion (UTF) z-Transformierte der Impulsantwort h[n] H(f) IH(f)I Im[H(f)] φ(f) H(f): Frequenzgang H(f) = H(z=ej2πfTs) Fourier-Transformierte von h[n] Polarkoordinatendarstellung => Re[H(f)] IH(f)I: Amplitudengang meistens in dB, d.h. 20*log10(IH(f)I) gerade Funktion, d.h. IH(f)I = IH(-f)I wenn h[n] reell: H(f) = H*(-f) φ(f): Phasengang ungerade Funktion, d.h. φ(f) = -φ(-f) φ(f) = arctan( Im[H(f)] / Re[H(f)] )
Frequenzgang eines LTD-Systems DSV 1, 2005/01, Rur, Filterentwurf, 7 Bedeutung des Amplituden- und Phasengangs cos(2πf0·nTs) IH(f0)I·cos[2πf0·nTs+φ(f0)] = IH(f0)I·cos[2πf0·(nTs-Δ0)] H(f) wobei Zeitverzögerung Linearer Phasengang H(f) verzögert alle Frequenzkomponenten um Δ=K/2π φ(f) = -K·f
Frequenzgang eines LTD-Systems DSV 1, 2005/01, Rur, Filterentwurf, 8
z-Transformation DSV 1, 2005/01, Rur, LTD-Systeme, 9 Laplace-Transformation von x[n]: Substitution: Definition z-Transformation: Eigenschaft: Zeitverschiebung x[n-k] z-k·X(z)
z-Transformation & Impulsantwort DSV 1, 2005/01, Rur, LTD-Systeme, 10 Beispiel: n = -1 0 1 2 3 … h[n] = 0 b0 -a1·b0 a12·b0 -a13·b0 … H(z) = 0·z1 +b0·z0 -a1·b0·z-1 +a12·b0·z-2 -a13·b0·z-3 … Impulsantwort h[n] = b0 . (-a1)n
Eigenschaften der z-Transformation DSV 1, 2005/01, Rur, LTD-Systeme, 11 a·x1[n] + b·x2[n] a·X1(z) + b·X2(z) Linearität (!) Zeitverschiebung (!) Faltung (!) Multiplikation mit Exponentialfolge Multiplikation mit der Zeit Anfangswerttheorem für einseitige z-Trafo Endwerttheorem für einseitige z-Trafo x[n-k] z-k·X(z) x[n] * h[n] X(z) · H(z) an·x[n] X(z/a) n·x[n] -z·dX(z)/dz
Frequenzgang eines LTD-Systems DSV 1, 2005/01, Rur, Filterentwurf, 12 H(z): Übertragungsfunktion (UTF) z-Transformierte der Impulsantwort h[n]
z-Transformation - Fouriertransformierte DSV 1, 2005/01, Rur, LTD-Systeme, 13 Fourier-/Laplace-Transformation: X(f) = X(s = j2πf) Laplace-/z-Transformation: X(s) = X(z = esTs) Fourier-/z-Transformation: X(f) = X(z = ej2πfTs) Beispiel: Approximation RC-Tiefpass 1. Ordnung mit fg=100 Hz fs= 10 kHz, b0= 0.06, a1= -0.94 =>
z-Ebene s-Ebene Im(z) Im(s) j2π·fs j2π·fs/2 Re(z) Re(s) -j2π·fs/2 -j2π·fs z-Transformation der s-Ebene DSV 1, 2005/01, Rur&Hrt, LTD-Systeme, 14 Substitution Imaginäre s-Achse wird mehrfach auf z-Einheitskreis abgebildet Linke s-Halbebene wird mehrfach in den z-Einheitkreis abgebildet
PN-Darstellung der UTF DSV 1, 2005/01, Rur, LTD-Systeme, 15 Nullstellen der UTF Pole der UTF Abstand Punkt P=ej2πfTs auf Einheitskreis zu Pol pk Beispiel: P=ej2πfTs für f=fs/8 K x[n] Ts Ts Ts s2 1 -1 1 -1 s4 f = 0 f = fs/2 s1 y[n] + 3 Pole s3 H(z) = K·(z-1)·(z+j)·(z-j) / z3 H(f=fs/8) = K·s1·s2·s3 / s43 Nullstelle
Vergleich: Laplace-, z- und Fourier-Trafo Demo: dsv1kap4_digisys_vergleich.m DSV 1, 2006/01, Hrt, LTD-Systeme, 16
Zusammenfassung LTD-Systeme DSV 1, 2005/01, Rur, LTD-Systeme, 17 Faltungssumme Impulsantwort h[n] x[n] y[n] Differenzengleichung H(f): Frequenzgang H(z): Übertragungsfunktion X(f) X(z) Y(f) = X(f)·H(f) Y(z) = X(z)·H(z) <= H(f) = H(z=ej2πfTs)
Korrelation DSV 1, 2006/01, Hrt, LTD-Systeme, 18 • Anwendungen:
Korrelation DSV 1, 2006/01, Hrt, LTD-Systeme, 19
Korrelation DSV 1, 2006/01, Hrt, LTD-Systeme, 20 *