Download
1 / 12
120 likes | 137 Views
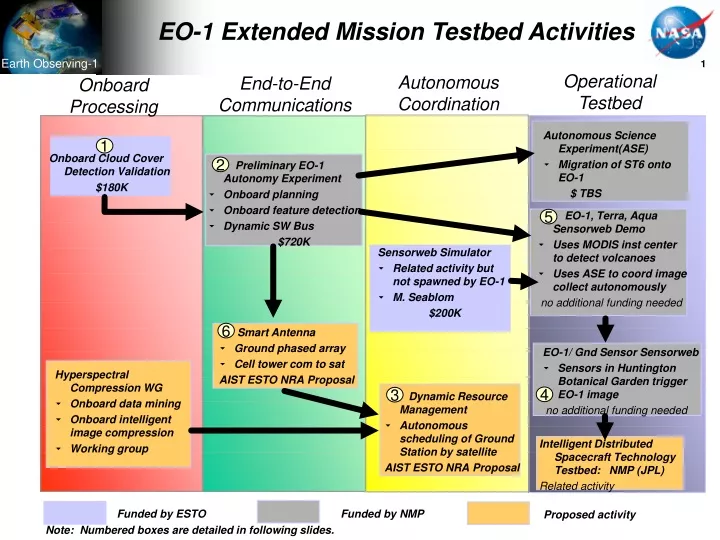
EO-1 Extended Mission Testbed Activities. Operational Testbed. Autonomous Coordination. End-to-End Communications. Onboard Processing. Autonomous Science Experiment(ASE) Migration of ST6 onto EO-1 $ TBS. Onboard Cloud Cover Detection Validation $180K. 1.

E N D
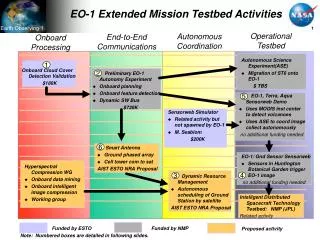
EO-1 Extended Mission Testbed Activities Operational Testbed Autonomous Coordination End-to-End Communications Onboard Processing Autonomous Science Experiment(ASE) • Migration of ST6 onto EO-1 $ TBS Onboard Cloud Cover Detection Validation $180K 1 Preliminary EO-1 Autonomy Experiment • Onboard planning • Onboard feature detection • Dynamic SW Bus $720K 2 EO-1, Terra, Aqua Sensorweb Demo • Uses MODIS inst center to detect volcanoes • Uses ASE to coord image collect autonomously no additional funding needed 5 Sensorweb Simulator • Related activity but not spawned by EO-1 • M. Seablom $200K Smart Antenna • Ground phased array • Cell tower com to sat AIST ESTO NRA Proposal 6 EO-1/ Gnd Sensor Sensorweb • Sensors in Huntington Botanical Garden trigger EO-1 image no additional funding needed Hyperspectral Compression WG • Onboard data mining • Onboard intelligent image compression • Working group Dynamic Resource Management • Autonomous scheduling of Ground Station by satellite AIST ESTO NRA Proposal 4 3 Intelligent Distributed Spacecraft Technology Testbed: NMP (JPL) Related activity Funded by ESTO Funded by NMP Proposed activity Note: Numbered boxes are detailed in following slides.
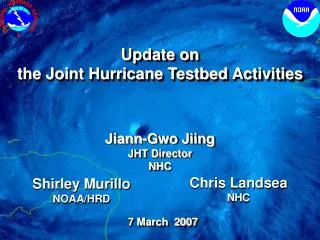
EO-1 Onboard Cloud Cover Detection With Onboard Replanning Funded by ESTO 1 Funded by NMP If Score < N Proposed to AIST ESTO NRA 3 2 Yes No Message GS to cancel old downlink and schedule new contact & receive confirmation Calculate cloud score onboard (L0, L1 + cloud alg) Replan alternate image onboard and reschedule S/C activities to accomplish new image Downlink as planned to 1st GS Take Image Screen for clouds onboard
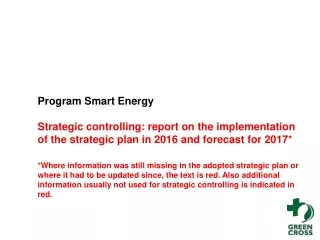
EO-1 Testbed Target Architecture Registrar Name Assignment=“GND 1” Registrar Name Assignment=“SC 1” Registrar Name Assignment=“GND 2” Registrar Name Assignment=“SC 2” Registrar Name Assignment=“SC N” Registrar Name Assignment=“GND N” • Create seamless messaging system across constellation/mission components • Multi-protocol • Easy integration of heritage components to create “ad hoc” constellations • Components send each other messages similar to internet (URL) by knowing registered name, details taken care of by system • Once in place, mission autonomy easy to create and integrate Dynamic Software Bus (DSB) Across Multiple Entities SW task within mission component Internal DSB Internal DSB Registrar Server Proposed to AIST ESTO NRA 3 Bus I/F Task Example: This could be Alaska Ground Station or Mission Operations Center Funded by NMP 2 5
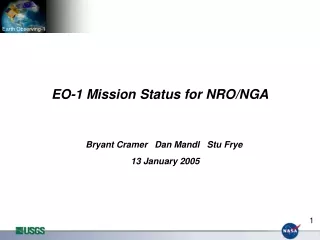
Preliminary EO-1 Autonomy Experiment Flight Software Architecture (Conceptual) Science High Level Goals Science Goal Monitor(on ground) -response seconds to days Status (web-based) Sub-goals ObservationGoals Status CASPER Planner (in S/C) – response in 10s of minutes Onboard Science Instrument Data Image Plans of Activities(high level) New High level S/C State Information Band Stripping SW SCL – response in seconds with rules, scripts Commands (low level) 2 S/C State Funded by NMP EO-1 Conventional Flight Softwarereflexive response Existing Control Signals (very low level) Sensor Telemetry Spacecraft Hardware On spacecraft
Existing WARP Tasks ... Integrated S/W Architecture Funded by NMP 2 EO-1 TLM Channels VC0 & VC3 2 APIDs for SCL Control 2 APIDs for SCL real-time control New Mem Dwell Cloud Cover Task SCL Commands(to C&DH M5 via WARP Remote Terminal) SCL Script Tasks SCL Command Tasks SCL Telemetry Tasks CASPER & ScienceTask WARP Remote Terminal Bridge Task Existing Existing WARP Drivers ... WARP Software Bus (SB) SCL Software Bus VxWorks / Tornado (OS)
Preliminary EO-1 Autonomy Experiment Autonomous Science Applications Funded by NMP 2 Autonomous Change Detection • Ice formation/retreat, flooding • Atmospheric Change • Volcanic processes (Lava, mud, plume) • Autonomous Feature Identification • Volcanic cinder cones and craters • Impact craters • Sand dunes • Autonomous Discovery • Identify features which differ from the background • Downlink science products: science events, features - not raw data • Achieves 2x-100’s x data reduction!
Preliminary EO-1 Autonomy Experiment : Autonomous Science “Rapid Reaction” Concept • Description: • An autonomously-planned re-allocation of resources and subsequent observation triggered by onboard data analysis • Increases science content of returned data • Rapid Reaction Example Scenario • Observe target as part of base observation plan • Repeat observation for change detection purposes • Detect change: if magnitude of change is sufficient, then: • Planner triggers third observation to be obtained on next suitable orbit within 48 hours or by another spacecraft • New target may cover original target and/or a new area affected by the process Funded by NMP 2
Target Purpose for Sensorweb and Dynamic Software Bus Experiments • Key functionality to demonstrate with sensorwebs and dynamic software bus • Autonomous event triggered image • EO-1 image triggered by MODIS image • EO-1 image triggered by data value of ground sensor • Subpixel measurement correlation between ground truth instruments and remote sensing pixels • EO-1 pixels are 10 meters or 30 meters • Huntington Botanical Garden sensors within a few meters of each other in some cases • Autonomous resource optimization for mission resources • E.g. increase data rate or use of mission resources over area of interest for rapidly changing events
EO-1/Ground Sensorweb Demo Scenario CASPER replans EO-1 tasking by calculating times, slews and momentum management; and sends appropriate real time commands to C&DH system to execute plan EO-1 (Hyperion & ALI) 7 EO-1 Mission Ops Center S/C Load w/ Lat/Long MOPSS ASIST/FEDS 5 Target Lat/Long 6 8 Downlink image USGS Eros Data Center EO-1 is notified and autonomously replans to take a closer look Target latitude and longitude 9 4 Configure sensorweb for needed data and triggers 2 Science Goal Monitor WS Data from ground instruments continuously sent to internet: light flux, air temp, soil temp, soil moisture etc. data 3 3 10 Status of request & coordinated image/data 1 High Level Goal: eg. When soil moisture > X schedule EO-1 to take image ASAP No additional funding needed for preliminary experiment 4
EO-1/Terra/Aqua Sensorweb Demo Scenario EO-1 is notified and autonomously replans to take a closer look CASPER replans EO-1 tasking by calculating times, slews and momentum management; and sends appropriate real time commands to C&DH system to execute plan Terra/Aqua images wide swath w/MODIS 7 3 Downlink images Downlink images via direct broadcast 8 6 Target Lat/Long USGS EROS Data Center (EDC) 8 Image target EO-1 Mission Ops Center (MOC) MODIS Instrument Center S/C Load w/ Lat/Long ASIST/FEDS “Rapid-Fire” Workstations 2 Request forest fire alert within XX area E-Mail alert within 3 hrs of image acquisition with forest fire lat/long 4 Science Goal Monitor (SGM) WS • Automatically coordinate with MOC on following activities: • Convert lat/long to WRS • Create LTAP record • Calculate ALI frame rate • Priority scheme • Reformat for ingestion by CASPER(onboard planner) • Create and transfer load to ASIST 5 9 High Level Goal: eg. When MODIS detects a forest fire within XX area, take a closer look with EO-1 Hyperion and/or ALI 1 Status of request & coordinated images(from EDC & DAAC)
Smart Ground Antenna Proposal Proposed to AIST ESTO NRA 6 • Conceptual antenna system architecture for low earth orbiting satellites, based on small dishes (left) and alternative concept based on Space Fed Lens (right), placed on backdrop of tennis court to visualize size • No moving parts, reliable, inexpensive • Use adaptive beamforming (phased array) to electronically point antennas • Enable “cell-tower” network type of ground to space communications to enable constant contact with S/C
Other Testbed Activities (Completed or Proposed) • The following are the remaining completed or proposed activities on the EO-1 testbed • A “stare” maneuver to raise the signal-to-noise ratio of the instruments to undertake a coral reef survey for NOAA (complete) • Three Axis Magnetometer for spacecraft contingency pointing (study partially complete with complete validation proposed) • Image Aided Navigation for fine guidance during hyperspectral imaging (proposed)