Download
1 / 9
100 likes | 271 Views
Dense 3D reconstruction with an uncalibrated stereo system using coded structured light. Procams 2005. Ryo Furukawa Faculty of Information Sciences, Hiroshima City University, Japan Hiroshi Kawasaki Faculty of Information Engineering, Saitama University, Japan. Objective. Using CSL

E N D
Dense 3D reconstruction with an uncalibrated stereo system using coded structured light Procams 2005 Ryo Furukawa Faculty of Information Sciences, Hiroshima City University, Japan Hiroshi Kawasaki Faculty of Information Engineering, Saitama University, Japan
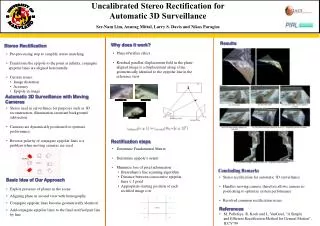
Objective • Using CSL • High accuracy • Dense sampling • Using normal camera and projector • Low cost • Self-calibration • Moving devices freely Self-calibrating stereo vision system based on CSL
Approaches • Solving epipolar constraints directly with nonlinear optimization (Gauss-Newton method) • Estimated parameters: • Extrinsic parameters+Focal Length of one of the devices(Camera/Projector) • Resolving scaling ambiguity • Simultaneous reconstruction • Measuring scaling with laser beam
Epipolar constraints • Epipolar constraint Extrinsic parameter Using as a minimizing function?
Epipolar constraints • When estimating focal length of devices…. • Minimizing ends up with BIASED estimation of because effect of noise to the objective function varies with
Epipolar constraints • Normalization of errors Minimize • Bias of the estimation of is removed.
Simultaneous reconstruction • Capture multiple scenes • 3D reconstruction simultaneously Advantages • Consistent scaling • Improving result • Redundant input
Live Demo • We plan to do a live demo. • Please come and look!