Download
1 / 1
10 likes | 333 Views
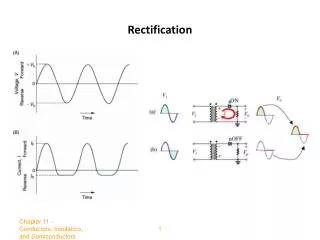
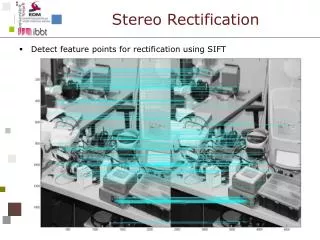
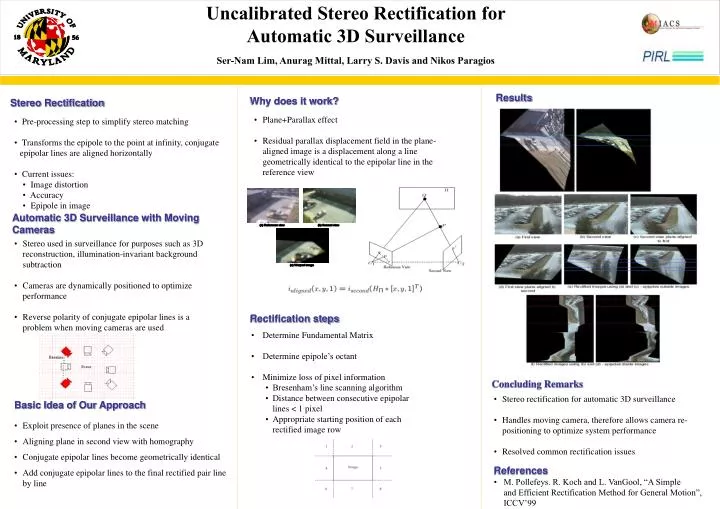
Uncalibrated Stereo Rectification for Automatic 3D Surveillance. Ser-Nam Lim, Anurag Mittal, Larry S. Davis and Nikos Paragios. Results. Why does it work?. Stereo Rectification. Plane+Parallax effect

E N D
Uncalibrated Stereo Rectification for Automatic 3D Surveillance Ser-Nam Lim, Anurag Mittal, Larry S. Davis and Nikos Paragios Results Why does it work? Stereo Rectification • Plane+Parallax effect • Residual parallax displacement field in the plane-aligned image is a displacement along a line geometrically identical to the epipolar line in the reference view • Pre-processing step to simplify stereo matching • Transforms the epipole to the point at infinity, conjugate epipolar lines are aligned horizontally • Current issues: • Image distortion • Accuracy • Epipole in image Automatic 3D Surveillance with Moving Cameras • Stereo used in surveillance for purposes such as 3D reconstruction, illumination-invariant background subtraction • Cameras are dynamically positioned to optimize performance • Reverse polarity of conjugate epipolar lines is a problem when moving cameras are used Rectification steps • Determine Fundamental Matrix • Determine epipole’s octant • Minimize loss of pixel information • Bresenham’s line scanning algorithm • Distance between consecutive epipolar • lines < 1 pixel • Appropriate starting position of each • rectified image row Concluding Remarks • Stereo rectification for automatic 3D surveillance • Handles moving camera, therefore allows camera re-positioning to optimize system performance • Resolved common rectification issues Basic Idea of Our Approach • Exploit presence of planes in the scene • Aligning plane in second view with homography • Conjugate epipolar lines become geometrically identical • Add conjugate epipolar lines to the final rectified pair line by line References • M. Pollefeys. R. Koch and L. VanGool, “A Simple • and Efficient Rectification Method for General Motion”, ICCV’99