Download
1 / 20
200 likes | 496 Views
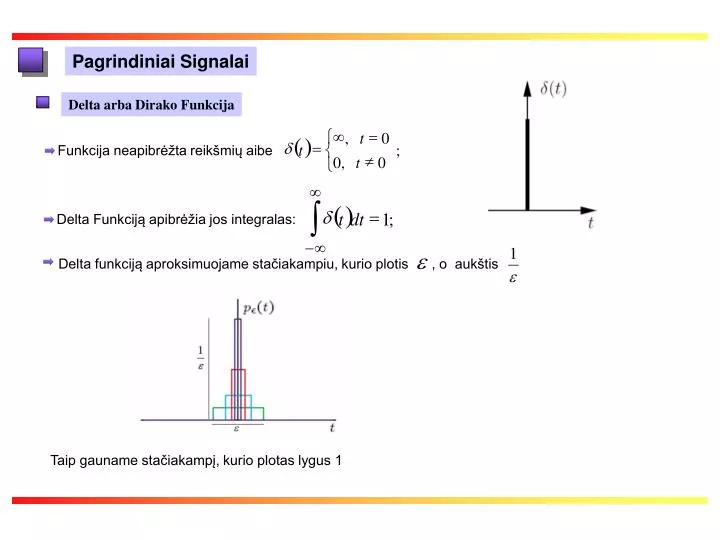
¥. =. ì. ,. t. 0. (. ). d. =. t. ;. í. ¹. 0. ,. t. 0. î. ¥. ò. (. ). d. =. t. dt. 1. ;. -. ¥. Funkcija neapibrėžta reikšmių aibe. Delta Funkciją apibrėžia jos integralas:. Pagrindiniai Signalai. Delta arba Dirako F unkcija.

E N D
¥ = ì , t 0 ( ) d = t ; í ¹ 0 , t 0 î ¥ ò ( ) d = t dt 1 ; - ¥ Funkcija neapibrėžta reikšmių aibe Delta Funkciją apibrėžia jos integralas: Pagrindiniai Signalai Delta arba Dirako Funkcija Delta funkciją aproksimuojame stačiakampiu, kurio plotis , o aukštis Taip gauname stačiakampį, kurio plotas lygus 1
Kai, tai . Tokiu būdu, stačiakampis artėja prie Delta funkcijos Funkcijų ir sandaugos integralas duoda funkcijos reikšmę laiko momentu t=0 Pagrindiniai Signalai Delta (Dirako) funkcija
Žingsnio funkcija Žingsnio funkcijos reikšmės pasikeičia nuliniu laiko momentu, o pats pokytis įvyksta per be galo mažą laiko tarpą: Todėl pagrįstai galime manyti, kad Žingsnio funkcijos kitimo greitis nuliniu laiko momentu lygus begalybei. Vadinasi, Žingsnio funkcijos kitimo greičio grafikas bus DELTA funkcija: Pagrindiniai Signalai Žingsnio Funkcija Integruojant Delta funkciją gaunama Žingsnio funkcija:
Kadangi žinome, kad funkcijų ir sandaugos integralas duoda funkcijos reikšmę laiko momentu t=0. Todėl prielaidai patikrinti skaičiuosime funkcijų Žingsnio funkcijos diferencialas užrašomas: ir sandaugos integralą. Išvada: Žingsnio funkcijos diferencialas yra DELTA funkcija Pagrindiniai Signalai Žingsnio Funkcija Patikrinsime prielaidą. Atliekant diferencijavimą gaunamas funkcijos reikšmių kitimo greitis Žingsnio funkcija trūki (reikšmių pokytis įvykstą per laiką =0), todėl nediferencijuojama
Pereinant nuo tolydžios laiko ašies prie diskrečios, be galo mažas laiko pokytis: Keičiamas kiek norimai mažu, tačiau baigtinio dydžio pokyčiu: Šis periodas (T) vadinamas diskrečios laiko ašies reikšmių periodu. Kadangi T = CONST , tai bet kuri diskrečios laiko ašies reikšmė gali būti paskaičiuota padauginus jos numerį (n) iš periodo T. Laiko ašies numeriai yra sveiki skaičiai n 0 2 3 -2 -1 1 Pagrindiniai Signalai Diskrečios laiko ašies reikšmių periodas T = CONST Vaizduojant diskrečią laiko ašį, simbolis T nerašomas Diskrečioji laiko ašis:
Diskretizavimo operacija Veiksmai su signalais Postūmio operacija Signalai laike stumiami pridedant ar atimant postūmio reikšmę Signalas y vėluoja signalo x atžvilgiu Signalasy lenkia signalą x Amplitudės Mastelio keitimo operacija Aritmetinės operacijos Signalų sudėtis Signalų daugyba Kaupimo operacija Laiko Mastelio keitimo (išretinimo) operacija a – sveikas teigiamas skaičius
Diskretaus laiko signalai Perėjimas iš tolydžiosios į diskrečiąją laiko ašį naudojant DELTA funkciją Turime tolydžiąją laiko ašį () ir joje apibrėžtą tolydžiąją funkciją f(). Žinodami, kad f() reikšmę nuliniu laiko momentu galime gauti integruodami sandaugą: Funkcijos reikšmę laiko momentu (T) galime rasti skaičiuodami integralą: Pasinaudoję postūmio operacija, funkcijos reikšmes diskrečiais laiko momentais (nT) skaičiuojame: T – laiko ašies reikšmių periodas; n – sveikų skaičių seka Kadangi funkcijos reikšmių tarp dviejų laiko momentų nežinome, tai Ir laiko ašies reikšmių tarp šių momentų nevertiname (į jas nekreipiame dėmesio). Tokiu būdu gauname diskrečią laiko ašį.
Diskretus Vienetinio impulso signalas Diskretaus laiko signalai Diskretus Žingsnio signalas
Ryšys tarp Diskrečių Vienetinio Impulso ir Žingsnio signalų Diskrečioji žingsnio funkcija gali būti gauta naudojant vienetinio impulso funkciją. Diskretaus laiko signalai Analogiškai kaip ir tolydaus laiko atveju, iš diskrečios žingsnio funkcijos galime gauti Vienetinio impulso funkciją Šiam veiksmui atlikti turime panaudoti signalų: a) postūmio b) aritmetinės sudėties operacijas Šiam veiksmui atlikti turime panaudoti signalų: a) postūmio b) aritmetinės sudėties operacijas
Pagrindiniai Signalai clear all; close all N = 1000; % signalo reiksmiu skaicius N1 = 50; % vaizduojamu reiksmiu skaicius delta = zeros(N,1); delta(1)= 1;
Pagrindiniai Signalai n = 0 : N1-1; % x ašies reikšmių vektorius figure(1); stem (n, delta(n+1), '.', 'markersize', 18, 'linewidth', 2); title ('Vienetinio Impulso Signalas (VIS)'); xmin= -5; xmax= N1; ymin= 0; ymax= 1.2; axis([xmin xmax ymin ymax]); xlabel ('Atskaitos Reikšmė'); ylabel('Amplitude')
Pagrindiniai Signalai %-- Modeliuojamas pastumtas i dešinę per n0 atskaitų VIS n0 = 5; % vėlinimo / postumio reikšmė delta_n0 = circshift (delta,n0); % vykdomas postūmis į % dešinę n= 0 : N1-1; % x ašies reikšmių vektorius figure (2); stem (n, delta_n0(n+1), '.', 'markersize', 18, 'linewidth‘ ,2); title ('Pastumtas VIS'); xmin= -5; xmax= N1; ymin= 0; ymax= 1.2; axis ([xmin xmax ymin ymax]); xlabel ('Atskaitos Reiksme'); ylabel 'Amplitude')
Pagrindiniai Signalai z = zeros(N,1); % ciklinis postūmis per (i)atskaitų i DEŠINĘ for i= 1:N z= z+circshift (delta,i); end N = 0:N1-1; % x asies reiksmiu vektorius figure (5); stem (n, z(n+1), '.', 'linewidth', 2); title ('Diskretus Zingsnio Signalas'); xmin= -5; xmax= N1; ymin= 0; ymax= 1.2; axis ([xmin xmax ymin ymax]); xlabel ('Atskaitos Reiksme'); ylabel ('Amplitude')
Pagrindiniai Signalai z_n0 = zeros(N,1); for i= n0 : N-1 d= circshift(delta,i); z_n0= z_n0+d; % ciklinis postumis per i atskaitu i DESINE end
Tolydaus Signalo Modeliavimas A = 4 % modeliuojamo sinuso signalo amplitude f = 200; % modeliuojamo sinuso signalo dažnis theta= pi/4;% modeliuojamo sinuso signalo pradinė fazė Fd = 2150;% sinuso signalo diskretizavimo dažnis Td= 1/Fd; % sinuso signalo diskretizavimo periodas Ts= Td/100;% laiko ašies modeliavimo periodas t= (0:N-1).*Ts; % laiko ašies reikšmės y= A*sin(2*pi*f*t + theta);
Tolydaus Signalo Modeliavimas n = 0 : N-1; % x ašies reikšmių numeriai figure(3); plot(t,t(n+1),'.',t,y(n+1),'.'); title('Tolydaus laiko sinuso signalas'); xmin= 0; xmax= max(t); ymin= min(y)-1.2; ymax= max(y)+1.2; axis([xmin xmax ymin ymax]); xlabel('Laikas (s)'); ylabel('Amplitude')
- T modeliuoja mo laiko trukm ė = T const ; realaus laiko modeliavim o periodas s = T const ; tolydaus signalo diskretiza vimo periodas d = M T T ; modeliuoja mo realaus laiko reikšmiu skai čius s = N T T ; diskretaus /skaitmeni nio signalo reikšmiu skai čius d áá T T ; s d = n 0 .. N ; = i 0 .. M ; - M 1 [ ] å = ´ - y n y ( T i ) delta ( T n T i ) s d s = i 0 Tolydaus Signalo Diskretizavimo Modeliavimas
Tolydaus Tolydaus Signalo Diskretizavimo Modeliavimas d = round(Td/Ts); % Į diskretizavimo periodą turi tilpti sveikas laiko modeliavimo % periodų skaičius yd = zeros(N,1); y = shiftdim(y,1);% pakeičia eilutę į stulpelį j=1; for i= 1:d:N yd(i)= sum(y.*circshift(delta,i)); % ciklinis postumis per (i) atskaitų į DEŠINE j=j+1; end