Download
1 / 25
250 likes | 267 Views
Explore the nuances of nonsphericity in statistical methods and its impact on data analysis, with a focus on covariance components and autocorrelation. Learn about its various types and implications in fMRI research.

E N D
Covariance components IIautocorrelation & nonsphericity Alexa Morcom Oct. 2003
Nonsphericity - what is it and why do we care? • Need to know expected behaviour of parameters under H0 - less intrinsic variability means fewer df, so liberal inference • Null distribution assumed normal • Further assumed to be ‘iid’ - errors are identical and independently distributed • “Estimates of variance components are used to compute statistics and variability in these estimates determine the statistic’s d.f.”
An illustration... • A GLM with just 2 observations y = X* b + e y1 = X* b1 + e1 y2b2e2 e ~ N(0, s) iid iid assumptions e ~ N(0, C e) error covariance matrix C e
Spherical e2 e1 C e = 1 0 0 1
Non-identical e2 e1 C e = 4 0 0 1
Non-independent e2 e1 C e = 1 3 0.5 5
Varieties of nonsphericity in fMRI • Temporal autocorrelation - 1st level • Correlated repeated measures - 2nd level • Unequal variances between groups - 2nd level • Unequal within-subject variances - 1st level* • Unbalanced designs at 1st level* • (Spatial ‘nonsphericity’ or smoothness)
A traditional psychology example • Repeated measures of RT across subjects • RTs to levels 2 & 3 may be more highly correlated than those to levels 1 & 2
s11 s12 … s1k s21 s22 … s2k … … … ... sk1 sk2 … skk Sphericity Compound symmetry s2rs2 … rs2rs2 s2 … rs2 … … … ... rs2rs2 … s2 n subjects k treatments sij = sample var/ cov Variance of difference between pair of levels constant Not easy to see! By inspection: Treatment variances equal, treatment covariances equal
The traditional psychology solution • Sphericity - most liberal condition for SS to be distributed as F ratio • A measure of departure from sphericity: e • SS but approx. by F with Greenhouse-Geisser corrected d.f. (based on Satterthwaite approx): • A fudge in SPSS because e must be estimated, and this is imprecise (later…) so correction slightly liberal F [(k-1)e, (n-1)(k-1)e]
A more general GLM y = X*b + e OLS Wy = WX*b + We W/GLS • Weighting by W to render Cov(We) iid or known
A more general GLM y = X*b + e OLS Wy = WX*b + We W/GLS • Weighting by W to render Cov(We) iid or known bw = (WX)-y Cb = (WX)- WCeW T(WX)-T • i.e. covariance of parameter estimates depends on both the design and the error structure ... ^ ^
A more general GLM y = X*b + e OLS Wy = WX*b + We W/GLS • Weighting by W to render Cov(We) iid or known bw = (WX)-y Cb = (WX)- WCeW T(WX)-T • i.e. covariance of parameter estimates depends on both the design and the error structure ... • If Ce is iid with var = s2, then W = I; Cb Ce = s2I ^ ^ ^
A more general GLM y = X*b + e OLS Wy = WX*b + We W/GLS • Weighting by W to render Cov(We) iid or known bw = (WX)-y Cb = (WX)- WCeW T(WX)-T • i.e. covariance of parameter estimates depends on both the design and the error structure ... • If Ce is iid with var = s2, then W = I; Cb Ce = s2I • If single covariance component, direct estimation • Otherwise iterative, or determine Ce first ... ^ ^ ^
Colouring & whitening... • Imposed ‘ temporal smoothing ’ W=S (SPM99) Sy = SX*b + Se Cb = (SX)- SCeS T(SX)-T S is known and Ce assumed ‘swamped’ Resulting d.f. adjustment = Satterthwaite (but better than Greenhouse-Geisser) ^
Colouring & whitening... • Imposed ‘ temporal smoothing ’ W=S (SPM99) Sy = SX*b + Se Cb = (SX)- SCeS T(SX)-T S is known and Ce assumed ‘swamped’ Resulting d.f. adjustment = Satterthwaite (but better than Greenhouse-Geisser) • Prewhitening: if Ce is assumed known, premultiply by W = Ce½ (SPM2) b by OLS then is best estimator & Cb = (XT Ce-1X)-1 ^ ^ ^
Effects on statistics t = cTb (cTCbc )½ • Estimation is better - increased precision of b • Minimum covariance of estimator maximises t as Cb is in denominator (& depends on X & Ce: compare S, ‘bigger’ denominator) • Precise determination of d.f. as function of W (i.e. Ce) & design matrix X (if S, fewer)
Estimating multiple covariance components • Doing this at every voxel would require ReML at every voxel (my contract is too short…) • As in SPSS, such estimation of Ce would be imprecise, and inference ultimately too liberal: Ce = rrT + X Cb XT (critical ‘circularity’… ) • To avoid this, SPM2 uses spatial (cross-voxel) pooling of covariance estimation • This way, Ce estimate is precise & (prewhitened OLS) estimation proceeds noniteratively
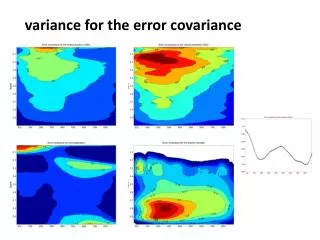
1st level nonsphericity • Model Ce as linear combination of bfs: C(l)e = Si(l1Q1 + l2Q2) • Timeseries autocorrelations in fMRI (Low freq. 1/f removed by high-pass filter) White noise is Q1 Lag 1 autoregressive AR(1) is Q2
Estimated Ce Q1 Q2
2nd level nonsphericity • Here model unequal variance across measures, &/or unequal covariance between measures C(l)e = Si(l1Q1 + l2Q2 … + … liQi) • No. of bfs depends on no. of measures & options selected Nonsphericity? Correlated repeated measures?
Variance for each measure for all subjects Covariance of each pair of measures for all subjects 3 measures: 3 diagonals Q1- Q3 3 off-diag Q4- Q6
What difference does it make? SPM99 OLS method (applied incorrectly) & assuming iid - big t, lots of df, liberal Worsley & Friston’s SPM99 method with Satterthwaite df correction - smaller t, fewer df, valid but not ideal (cons) SPM2 Gauss-Markov (ideal) estimator with prewhitening - full no. of df along with correct t value
Limitations of 2 level approach y = X(1)b(1) + e(1) b(1) = X(2)b(2) + e(2) y = X(1)X(2)b(2) + X(1)e(2) + e(1) Cov(y) = X(1)Ce(2)X(1)T + Ce(1) (into ReML) • 2-stage ‘summary statistic’ approach assumes ‘mixed effects’ covariance components are separable at the 2 levels • Specifically, assumes design X & variance same for all subjects/ sessions, even if nonsphericity modelled at each level