Download
1 / 18
180 likes | 339 Views
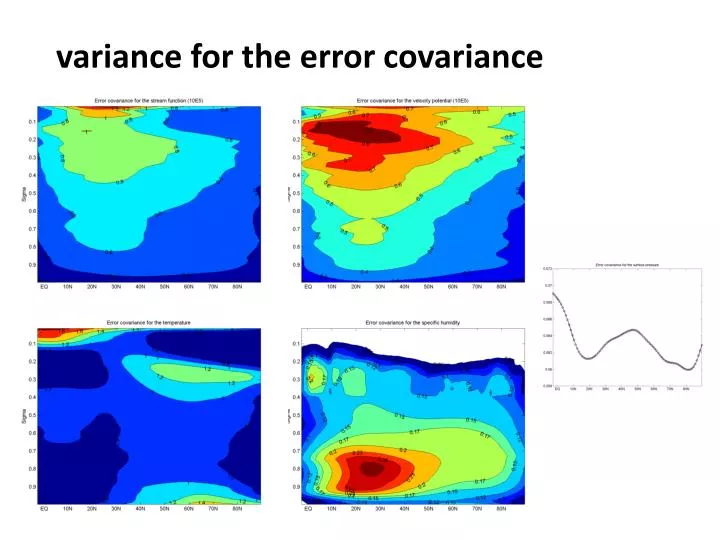
variance for the error covariance. horizontal scale for the error covariance. vertical scale for the error covariance. vertical scale profile for the error covariance. projection of stream function onto balanced temperature. projection of streamfunction onto velocity potential.

E N D
Minimization and Preconditioning John C. Derber NOAA/NWS/NCEP/EMC GSI User orientation meeting
Basic structure • Outer iteration • Most of outer iteration in routine glbsoi • Accounts for small nonlinearities which are complex to include and changes in quality control (especially for radiances) • If linear and no changes in QC should be same as doing more inner iterations • Inner iteration • Solves partially linearized version of objective function • Mostly in routine pcgsoi GSI User orientation meeting
Outer iteration • Currently background error cannot change in outer iteration (due to preconditioning in inner interation) • For the current problem, we find that 2 outer iterations appears to work reasonably well except for precip. • Often we run three outer iterations so that we can see the fit to the obs. at the end of the second outer iteration GSI User orientation meeting
Outer iteration • Major operations within outer iteration • Read current solution (read_wrf_…, read_guess) • Read in statistics (prewgt, first outer iteration only) • Call setup routines (setuprhsall) • Call pcgsoi (solve inner iteration) • Write solution • Difference from background kept in xhatsave and yhatsave (= B-1xhatsave). GSI User orientation meeting
Inner iteration • Solves partially linearized sub-problem • Uses preconditioned conjugate gradient • Stepsize calculation exact for linear terms and approximate for nonlinear term • Current nonlinear terms (if not using variational QC) • SSM/I wind speeds • Precipitation • Penalizing q for supersaturation and negative values GSI User orientation meeting
Inner iteration - algorithm • J = xTB-1x + (Hx-o)TO-1(Hx-o) (assume linear) • define y = B-1x • J = xTy + (Hx-o)TO-1(Hx-o) • Grad Jx = B-1x +HTO-1(Hx-o) = y + HTO-1(Hx-o) • Grad Jy = x + BHTO-1(Hx-o) = B Grad Jx • Solve for both x and y using preconditioned conjugate gradient (where the x solution is preconditioned by B and the solution for y is preconditioned by B-1) GSI User orientation meeting
Inner iteration - algorithm Specific algorithm x0=y0=0 Iterate over n Grad xn = yn-1 + HTO-1(Hxn-1-o) Grad yn = B Grad xn Dir xn = Grad yn + β Dir xn-1 Dir yn = Grad xn + β Dir yn-1 xn = xn-1 + α Dir xn (Update xhatsave as well) yn = yn-1 + α Dir yn (Update yhatsave as well) Until max iteration or gradient sufficiently minimized GSI User orientation meeting
Inner iteration - algorithm • intall routine calculate HTO-1(Hx-o) • bkerror multiplies by B • dprod x calculates β and magnitude of gradient • stpcalc calculates stepsize • Note that consistency between x and y allows this algorithm to work properly GSI User orientation meeting
Inner iteration – algorithm Estimation of β • β = (Grad xn-Gradxn-1)T Grad yn/ (Grad xn-Gradxn-1)T Dir xn • Calculation performed in dprodx • Also produces (Grad xn)T Grad yn GSI User orientation meeting
Inner iteration – algorithmEstimation of α (the stepsize) • The stepsize is estimated through estimating the ratio of contributions for each term α = ∑a ∕ ∑b • The a’s and b’s can be estimated exactly for the linear terms. • For nonlinear terms, the a’s and b’s are estimated by fitting a quadratic using 3 points around an estimate of the stepsize • The estimate for the nonlinear terms is reestimated using the stepsize for the first estimate GSI User orientation meeting
Inner iteration – u,v • Analysis variables are streamfunction and velocity potential • u,v needed for int routines • u,v updated along with other variables by calculating derivatives of streamfunction and velocity potential components of dir x and creating a dir x (u,v) GSI User orientation meeting