Download

1 / 28
280 likes | 321 Views
Explore the basics of state machines in VHDL design, including Mealy and Moore machines, state graph methodologies, HDL descriptions, and example tail light controller implementation. Learn VHDL coding for flip-flops and finite state machines.

E N D
VHDL State Machines • State Machine Basics • VHDL for sequential elements • VHDL for state machines • Example – Tail light controller • Example – counter • Example – gray code counter • Ref: text Unit 10, 17, 20
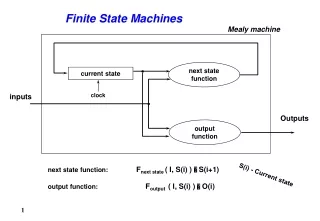
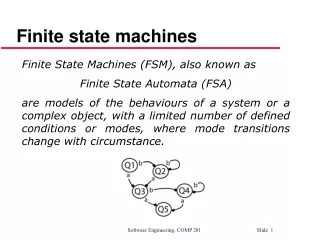
State Machine Basics • Mealy machine – outputs are a function of current state and current inputs. • Moore machine – outputs are a function of the current state only.
State machine design • To implement the state machine have option to use • Traditional methodology – state graph, state table, state assignment, K-maps, implementation • HDL methodology • HDL description directly from word description • State graph and then the HDL description
In HDLs need state elements • HDL code for the F/Fs • A simple rising edge D Flip Flop • ARCHITECTURE xxx OF yyy IS • BEGIN • PROCESS • BEGIN • WAIT UNTIL clk=‘1’ AND clk’event; • state <= next_state; • END PROCESS; • Semantics : Process runs at time 0 and then holds for clock to have an event (change value) and the new value is a ‘1’.
Another Form • This is an alternative to the previous HDL • ARCHITECTURE xxx OF yyy IS • BEGIN • PROCESS (clk) • BEGIN • IF (clk=‘1’ AND clk’event) • THEN state <= next_state; • END IF; • END PROCESS; • Semantics – Process runs once at time 0 and then holds until signal clk has an event. It then executes the IF statement.
D F/F with reset • ENTITY dff IS • PORT (clk,reset,din : IN bit; qout : OUT bit); • END dff; • ARCHITECTURE one of dff IS -- Entity had sig clk,reset,din: IN and qout:OUT • -- td_reset and td_in are constants. • BEGIN • PROCESS (clk) • BEGIN • IF (clk=‘0’ AND clk’event) THEN • IF (reset =‘1’) THEN • qout <=‘0’ AFTER td_reset; • ELSE • qout <= din AFTER td_in; • END IF; • END IF; • END PROCESS; • END one;
More complete D F/F • PROCESS (clk,preset,clear,next_state) • BEGIN -- active low preset and clear • IF (preset = ‘0’) THEN • state <= pr_state; --preset state • ELSIF (clear = ‘0’) THEN • state <= clr_state; --clear state • ELSIF (clk = ‘1’ AND clk’event) THEN --rising edge • state <= next_state; • END IF; • END PROCESS; • Semantics – runs once at startup. Then whenever any of the signals in the sensitivity list change value. • Asynchronous preset has priority over clear and a clock edge. • clear has priority over a clock edge.
VHDL for finite state machines • Use a process to describe the next state logic, often in a case statement used for determination of the next state. Will see this in the example. • Use a process to represent the latching/loading of the calculated next_state such that it becomes the current_state. This is the only process that generates sequential elements (F/Fs). The other processes represent combinational logic. • Use a third process to represent the generation of the outputs from the current state and possibly the inputs. This process will have as its inputs, the current state and, depending on the type of state machine, the state machine inputs.
Notes on VHDL style • The style applies to any HDL – VHDL, Verilog, System C • Documents well • Easily maintainable – excellent during development as changes are easily made • Style maps to physical logic – using this style can predict the number of state elements (~) that should be produced by synthesis • All three styles on the last slide simulate equally well, but this style also synthesizes well. Works in XILINX and Altera tools.
Example • The T-Bird tail light problem • The turn signal indicator had a light sequence on each lamp.
State machine description • State Diagram and Transition Table • Output is associated with state – a Moore machine
Goal is a HDL description • Often you still start with a state diagram and state table • Where to start with the code? • As with all HDL – start with the interface • WHAT ARE THE INPUTS AND OUTPUTS?
ENTITY for the controller • Inputs are a signal for • Right turn signal • Left turn signal • Hazard • Clock • Outputs are signals for the taillights • lc, lb, la • rc, rb, ra • HDL code for the entity • ENTITY t_bird IS • PORT(rts,lts,haz : IN bit; • clk : IN bit; • lc,lb,la : OUT bit; • ra,rb,rc : OUT bit); • END t_bird;
For the tail light controller • Inputs are signals for • Right Turn Signal • Left Turn Signal • Hazard • Clock • Outputs are the signals for the lights • la,lb,la • ra,rb,rc
The ARCHITECTURE • Will use 3 processes • In declarative region of ARCHITECTURE will declare the state_type for the states. • ARCHITECTURE state_machine OF t_bird IS • TYPE state_type IS (idle,l1,l2,l3,r1,r2,r3,lr3); • SIGNAL state,next_state : state_type; • BEGIN
1st Process – sequential elements • Use a process to specify the sequential elements • Here need only simple D F/Fs • -- Process to specify F/Fs • PROCESS • BEGIN • WAIT UNTIL clk=‘1’ AND clk’event; • state <= next_state; • END PROCESS; • This is the only part of the description that should result in state elements from synthesis.
2nd Process – next state generation • What is the next state given the current state and the value present on the inputs? • This process can be of considerable size. • Work well using a case statement.
Next State Process • Code continued • A separate action for each state that based on the inputs directs the value assigned to next_state.
3rd Process – Output signals • A separate process is used to generate the final outputs. • Works great for Moore type implementations. • Outputs are directly assigned to.
Complete VHDL code (no output) • ENTITY t_bird IS • PORT(rts,lts,haz, : IN bit; • clk : IN bit; • lc,lb,la : OUT bit; • ra,rb,rc : OUT bit); • END t_bird; • ARCHITECTURE state_mach OF t_bird IS • TYPE state_type IS (idle,l1,l2,l3,r1,r2,r3,lr3); • SIGNAL state,next_state : state_type; • BEGIN • -- Process to specify F/Fs • PROCESS • BEGIN • WAIT UNTIL clk=‘1’ AND clk’event; • state <= next_state; • END PROCESS; • -- next state logic • PROCESS • BEGIN • CASE state IS • WHEN idle => IF(haz=‘1’ OR (lts=‘1’ AND rts =‘1’) THEN • next_state <= lr3; • ELSIF (haz=‘0’ AND (lts=‘0’ AND rts=‘1’) THEN • next_state<=r1; • ELSIF (haz=‘0’ AND (lts=‘’1’ AND rts=‘0’) THEN • next_state<=l1; • ELSE next_state <= idle; • END IF: • WHEN l1 => IF (haz=‘1’) THEN next_state <= lr3; • ELSE next_state <= l2; • END IF; • WHEN l2 => IF (haz=‘1’) THEN next_state <= lr3; • ELSE next_state <= l3; • END IF; • WHEN l3 => next_state <= idle; • WHEN r1 => IF (haz=‘1’) THEN next_state <= lr3; • ELSE next_state <= r2; • END IF; • WHEN r2 => IF (haz=‘1’) THEN next_state <= lr3; • ELSE next_state <= r3; • END IF; • WHEN r3 => next_state <= idle; • WHEN lr3 => next_state <= idle; • END CASE; • END PROCESS;
Having HDL description • Simulate it in a test suite to verify the design meets specifications. This is the HDL topic of verification. • For this course will construct simple testbenches to do simple check. • HDL code can also be synthesized.
Results of synthesis • From a Mentor graphics tool (several years back)
From FPGA tools • When done in Quartis – ALTERA FPGA tool • Use the state machine VHDL code for synthesis
FPGA results • From the report • Combination LUTs – 15 • Dedicated logic registers – 8 (did a one hot encoding) • Total pins 10
The schematic • Big block for state elements
The implementation • The one hot state machine state diagram
Lecture summary • VHDL for state machines • T_bird tail light controller example • VHDL • Synthesis results