Download
1 / 16
160 likes | 282 Views
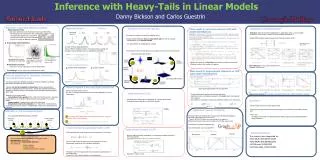
A Versatile Algorithm for Local Positioning in Closed Form. Niilo Sirola Institute of Mathematics Tampere University of Technology FINLAND. Introduction. Range and range difference measurements Systems of three quadratic surfaces Closed-form solution Several solutions (up to nine!).

E N D
A Versatile Algorithm for Local Positioning in Closed Form Niilo Sirola Institute of Mathematics Tampere University of Technology FINLAND Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Introduction • Range and range difference measurements • Systems of three quadratic surfaces • Closed-form solution • Several solutions (up to nine!) Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Local Positioning • Local stations • E.g. cellular base stations • Nonlinear behavior • Distant stations • E.g. positioning satellites • Range can be linearized with negligible error Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Geometric Model • Plane • range to distant station • range difference between distant stations • altitude • Sphere • range to local station • Paraboloid • range difference between distant and local station • Hyperboloid • range difference between local stations quadrics Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Intersection Types 1/4 • Intersection of three planes: • linear system • at most 1 distinct solution Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Intersection Types 2/4 • Intersection of two planes and a quadric: • two planes intersect in a line • 0-2 distinct solutions • second-degree polynomial Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Intersection Types 3/4 • Intersection of a plane and two quadrics: • up to four distinct solutions Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Intersection Types 4/4 • Intersection of three quadrics: • roots of a 9th degree polynomial • usually reduces to a simpler case Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Geometric Reduction • When intersection of two surfaces is planar, • one can be replaced with the intersection plane Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Algorithm • Acquire measurements • Transform to geometric form • Use local assumption to linearize distant measurements • Linearize further by intersection planes • Solve intersection(s) Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Comparison Against Least Squares • Pros: • gives all solutions, LS just one • very small computational cost • LS may perform poorly for strongly nonlinear cases • Cons: • can use only three measurements, LS uses all • no variance estimates Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Base station LS starting point True position Testing vs. Least Squares Iteration • Impact of LS starting point • (4 measurements: overdetermined system) Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Testing vs. Least Squares Iteration • LS started from both direct solutions, • the one with the smallest residual chosen Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Conclusions • position solution by intersecting three surfaces that are either planes or (branches of) quadrics of revolution • can be used as a preliminary step to obtain a set of starting points for LS iteration • multiple solutions • future research: choosing the correct position Sirola: A Versatile Algorithm for Local Positioning in Closed Form
normal vector station directrix vector Equations • plane: • quadric of revolution: Sirola: A Versatile Algorithm for Local Positioning in Closed Form
Quadric Surface Types Sirola: A Versatile Algorithm for Local Positioning in Closed Form