Download
1 / 1
10 likes | 177 Views
User 1. User 2. User u. Goal and Task Specifications. Results. Interface Agent 1. Interface Agent 2. Interface Agent i. Tasks. Solutions. Task Agent 1. Task Agent 2. Task Agent t. Info & Service Requests. Information Integration Conflict Resolution. Replies. MiddleAgent 2.

E N D
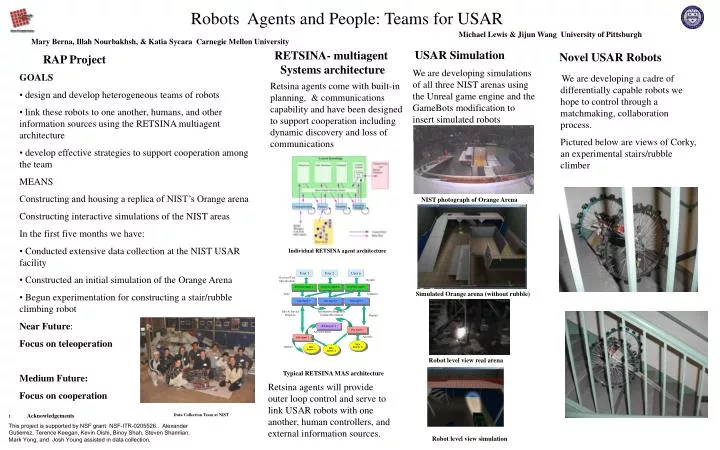
User 1 User 2 User u Goal and Task Specifications Results Interface Agent 1 Interface Agent 2 Interface Agent i Tasks Solutions Task Agent 1 Task Agent 2 Task Agent t Info & Service Requests Information Integration Conflict Resolution Replies MiddleAgent 2 Info Agent n Advertisements Info Agent 1 Answers Info Source m Info Source 1 Queries Info Source 2 Robots Agents and People: Teams for USAR Michael Lewis & Jijun Wang University of Pittsburgh Mary Berna, Illah Nourbakhsh, & Katia Sycara Carnegie Mellon University USAR Simulation RETSINA- multiagent Systems architecture Novel USAR Robots RAP Project We are developing simulations of all three NIST arenas using the Unreal game engine and the GameBots modification to insert simulated robots • GOALS • design and develop heterogeneous teams of robots • link these robots to one another, humans, and other information sources using the RETSINA multiagent architecture • develop effective strategies to support cooperation among the team • MEANS • Constructing and housing a replica of NIST’s Orange arena • Constructing interactive simulations of the NIST areas • In the first five months we have: • Conducted extensive data collection at the NIST USAR facility • Constructed an initial simulation of the Orange Arena • Begun experimentation for constructing a stair/rubble climbing robot • Near Future: • Focus on teleoperation • Medium Future: • Focus on cooperation • Data Collection Team at NIST We are developing a cadre of differentially capable robots we hope to control through a matchmaking, collaboration process. Pictured below are views of Corky, an experimental stairs/rubble climber Retsina agents come with built-in planning, & communications capability and have been designed to support cooperation including dynamic discovery and loss of communications NIST photograph of Orange Arena Individual RETSINA agent architecture Simulated Orange arena (without rubble) Robot level view real arena Typical RETSINA MAS architecture Retsina agents will provide outer loop control and serve to link USAR robots with one another, human controllers, and external information sources. 1 Acknowledgements This project is supported by NSF grant NSF-ITR-0205526.. Alexander Gutierrez, Terence Keegan, Kevin Oishi, Binoy Shah, Steven Shamlian, Mark Yong, and Josh Young assisted in data collection. Robot level view simulation