Download
1 / 40
400 likes | 644 Views
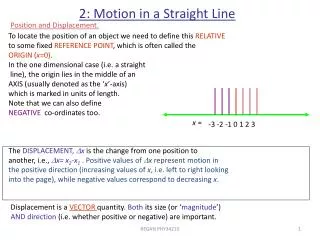
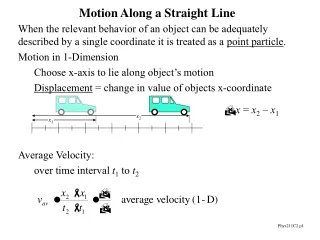
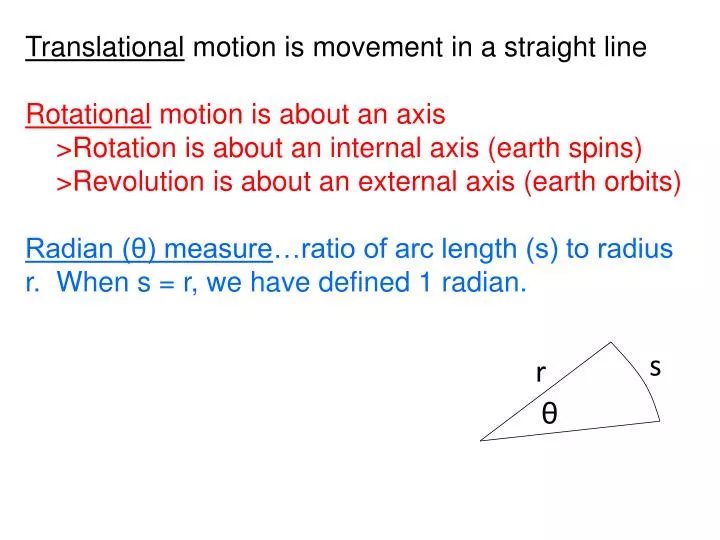
Translational motion is movement in a straight line Rotational motion is about an axis >Rotation is about an internal axis (earth spins) >Revolution is about an external axis (earth orbits)

E N D
Translational motion is movement in a straight line Rotational motion is about an axis >Rotation is about an internal axis (earth spins) >Revolution is about an external axis (earth orbits) Radian (θ) measure…ratio of arc length (s) to radius r. When s = r, we have defined 1 radian. s r θ
at ac Total acceleration, Direction for ω and α RHR: direction is along axis of rotation - curlfingers along direction of spin and direction of thumb is direction of ω and α. Explanation is in your book as to why…it stems from mathematical definition of vector in rotation. If object is speeding up, α is in direction of ω If object is slowing down, α is opposite ω
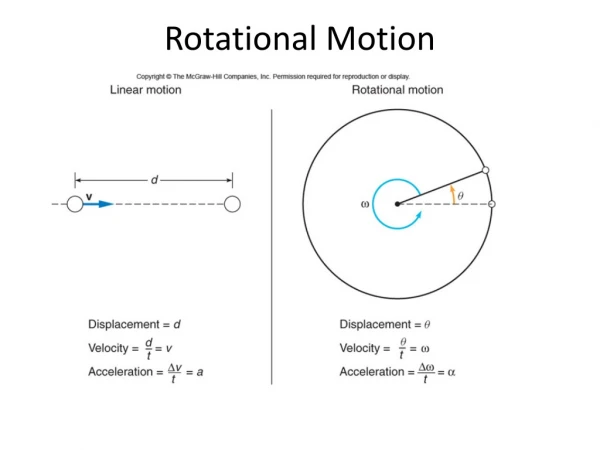
Constant acceleration equations: Linear: Rotation for fixed axis: v = vo +at ω = ωo + αt v2 = vo2 + 2aΔx ω2 = ωo2 + 2αΔθ Δx = vot + ½at2 Δθ = ωot + ½αt2 A disc rotates about an axis thru its center according to the equation: A) Find the angular velocity and acceleration for general time, t. B) Find the mag. of total linear acc. of a point 0.5m from center at t = 1s. C)Find the linear speed of a point on disc 20cm from center at t = 2s
Rotational Inertia and Kinetic energy The kinetic energy of a rotating object will be the sum of the kinetic energy of every point on the object: we define the rotational inertia (or moment of inertia) as where Iis measured in kg*m2
Rotational Inertia for a SYSTEM: A uniform rod of length L and mass M that can pivot about its center of mass has 2 masses m1 and m2 placed at each end. The moment of inertia of a uniform rod about its center is (1/12) ML2. Find moment of inertia for the system. L m1 m2
Calculus to find I To sum up the infinite points on a solid object you must integrate the equation for rotational inertia (I) What is the rotational inertia of a rod of length L and linear mass density, λ, spinning around an axis through its center of mass?
Parallel Axis Theorem It is used when you already know I of body about an axis that is parallel to another axis you are trying to find. What is the moment of inertia for a uniform rod of length L and mass M spinning halfway between the center of mass & its end?
Rotational kinetic energy If object has only translational motion then its kinetic energy is just If an object has only rotational motion then its kinetic energy is just If it has both translational & rotational motion then its kinetic energy is
The hollow ball has more R.I., therefore, more rotational KE for the same rotational speed. Both balls have the same translational speeds and same translational KE. Hollow ball will go higher due to higher rotational KE. Mass doesn’t matter. Just as with freefalling masses of different value. With equal speeds, a tennis ball will out roll a bowling ball or marble.
A uniform rod of mass m and length L can rotate about a frictionless hinge that is fixed. If the rod is released from rest where it rotates downward about the hinge, find tangential & angular speed of the edge of the rod at the bottom of the swing.
Cross Product The cross product is a vector product (recall dot product was a scalar product). The cross product of two vectors produces a third vector which is perpendicular to the plane in which the first two lie. That is, for the cross of two vectors, A and B, we place A and B so that their tails are at a common point (tail to tail). Their cross product, A x B, gives a third vector, C, whose tail is also at the same point as those of A and B. The vector C points in a direction perpendicular (or normal) to both A and B. The cross product is defined by the formula A x B = |AB|sinθ î × î = ĵ × ĵ = k×k = (1)(1)(sin 0°) = 0
r O Newton’s 2nd Law for Rotation Torque can cause a change in rotational motion or can cause a rotational acceleration. The distance from the pivot that the force acts is called the leverarm or moment arm, r. F The moment arm or lever arm is the perpendicular distance from the axis of rotation to the line of force The line of force or line of action is a line drawn at the point of application in the direction of the application of the force
Two masses hang over a fixed pulley. The pulley has mass 1.5 kg & radius 15cm where m1=15 kg and m2 = 10kg. The rope moves through the pulley without slipping. A. What is the acceleration of the boxes? m1 m2 B. Determine the two tensions.
Yo-Yo A string is wound around a Yo-Yo of mass M and radius R. The Yo-Yo is released and allowed to fall from rest. Find acceleration and tension in string as it falls. Make rotation equation and force equation for Yo-Yo.
Work & Power Workdone on an object can change either its translational kinetic energy or rotational kinetic energy or both
Consider a particle of mass, m, instantaneous velocity, v, and position vector, r, where particle moves in the xy plane about origin O. y v m r x O
y p r θ θ x O rsinθ The particle therefore has momentum, p=mv. We extend the position vector, r, to see the angle between r and p. Angular Momentum of a particle moving about point O, is defined as: Direction of L is out of page using RHR.
Continuing with the formula for angular momentum… Assuming the angle between r and p is 90o then L = rmv L = rm(rω) (using our linear-angular conversion) where I=mr2, so we now get L = mr2ω L = I ω
NOTE: An object can possess angular momentum about any point, regardless if it’s moving in a circle, orbit, or line about some point. In the figure to left, a dropped object can have angular momentum about the origin where r is increasing along with the velocity and therefore the angular momentum.
Conservation of Angular Momentum Assuming no net external torques Relationship between force (F), torque (τ), and momentum vectors (p and L) in a rotating system Consider the next example in regards to torque and angular momentum vectors
EXAMPLE 1 Consider a thin rod of mass, M, and length, L, lying on a frictionless table. There is a frictionless pivot at the top end of the rod Top View A mass, m, slides in a speed, vo, and collides with the rod a distance 2/3L from pivot. Find the angular velocity after the collision The mass rebounds with speed, ¼vo, where moment of inertia of rod is 1/12ML2 about CM.
EXAMPLE 2 A dart of mass, m, is shot with speed, vo, at a hoop of mass, M, and radius R. The hoop can be considered a ring. The dart strikes and sticks into top of hoop.
a) Find speed that wheel and dart rotate with after collision. b) Find KE lost due to collision.
ROLLING Consider a wheel that only has pure translational movement. All points on wheel have the same velocity. Consider a wheel that has pure rotation. All points have the same angular velocity, but the linear velocity depends on the distance from the center.
If a wheel has both translational and rotational movement across a level surface, this is what is referred to as rolling motion. Relative to the point of contact with surface (bottom of the wheel), the top of wheel is moving twice as fast as center of wheel (vedge > vCM ). The bottom of wheel is considered to be instantaneously at rest with no relative motion with ground.
Rolling without Slipping If object rolls without slipping, the arc-length of a path along the surface of the object as it rotates matches the translational distance traveled by the center of the object. Since s = Rθ Differentiating with respect to time (ds/dt = Rdθ/dt) yields vcm = Rω(R = dist from pt of contact) acm = Rα **These are the conditions for rolling without slipping or smooth rolling.
If a circular object rolls without slipping where vcm= constant, then acm = 0. Consequently, angular acceleration is zero and the net torque is zero. Thus, no net torque is needed to maintain rolling without slipping at constant speed. (angular momentum is enough to keep object turning) An object that rolls without slipping over a frictionless surface continues to do so, and an object that rolls without slipping at constant speed with friction experiences no frictional force…meaning, you don’t need friction to continue to roll.
Violating pure rolling condition: If a force were applied to COM of a sphere in the absence of friction, the sphere would start to move, changing vCM, but without changing ω. This violates our condition, vCM =Rω, therefore the sphere starts to slide. vcm = Rω & acm = Rα are invalid. F
If a net force acts on a rolling wheel to speed it up or slow it down, than that net force causes an aCM along the direction of travel. In conjunction, this causes an angular acceleration. In order to counteract any tendency to slip if αis too large, static friction acts to maintain pure rolling. Below is an example if the wheel was made (by axle turning faster) to move faster to the right while already in motion. Static prevents slipping to left aCM fs If the wheel was made to slow down, both vectors would be reversed.
Example A solid cylinder is at rest on a flat surface. When a horizontal force is exerted on the cylinder’s axle, what is the minimum coefficient of static friction to keep the cylinder from slipping? Fapp fs
Consider a solid sphere rolling from rest down an incline. What forces would act on rolling sphere? Would friction have to act?
Determine aCM and the static frictional force on sphere of mass, m, & radius R.
Rolling with Slipping A bowling ball of mass, m, and radius, R, is initially thrown so that it only slides with speed vo but doesn’t rotate. As it slides, it begins to spin, and eventually rolls without slipping. How long will it take to stop sliding with only pure rolling without slipping?